ABSTRACT
An endoscopic imaging system includes a reusable control cabinet having a number of actuators that control the orientation of a lightweight endoscope that is connectable thereto. The endoscope is used with a single patient and is then disposed. The endoscope includes an illumination mechanism, an image sensor, and an elongate shaft having one or more lumens located therein. An articulation joint at the distal end of the endoscope allows the distal end to be oriented by the actuators in the control cabinet. The endoscope is coated with a hydrophilic coating that reduces its coefficient of friction and because it is lightweight, requires less force to advance it to a desired location within a patient.
FIELD OF THE INVENTIONThe present invention relates to medical devices in general and therapeutic and diagnostic endoscopes in particular.
BACKGROUND OF THE INVENTIONAs an aid to the early detection of disease, it has become well established that there are major public health benefits from regular endoscopic examinations of internal structures such as the alimentary canals and airways, e.g., the esophagus, lungs, colon, uterus, and other organ systems. A conventional imaging endoscope used for such procedures comprises a flexible tube with a fiber optic light guide that directs illuminating light from an external light source to the distal tip where it exits the endoscope and illuminates the tissue to be examined. Frequently, additional optical components are incorporated to adjust the spread of the light exiting the fiber bundle and the distal tip. An objective lens and fiber optic imaging light guide communicating with a camera at the proximal end of the scope, or an imaging camera chip at the distal tip, produce an image that is displayed to the examiner. In addition, most endoscopes include one or more working channels through which medical devices such as biopsy forceps, snares, fulguration probes, and other tools may be passed.
Navigation of the endoscope through complex and tortuous paths is critical to success of the examination with minimum pain, side effects, risk, or sedation to the patient. To this end, modern endoscopes include means for deflecting the distal tip of the scope to follow the pathway of the structure under examination, with minimum deflection or friction force upon the surrounding tissue. Control cables similar to puppet strings are carried within the endoscope body in order to connect a flexible portion of the distal end to a set of control knobs at the proximal endoscope handle. By manipulating the control knobs, the examiner is usually able to steer the endoscope during insertion and direct it to a region of interest, in spite of the limitations of such traditional control systems, which are clumsy, non-intuitive, and friction-limited. Common operator complaints about traditional endoscopes include their limited flexibility, limited column strength, and limited operator control of stiffness along the scope length.
Conventional endoscopes are expensive medical devices costing in the range of $25,000 for an endoscope, and much more for the associated operator console. Because of the expense, these endoscopes are built to withstand repeated disinfections and use upon many patients. Conventional endoscopes are generally built of sturdy materials, which decreases the flexibility of the scope and thus can decrease patient comfort. Furthermore, conventional endoscopes are complex and fragile instruments that frequently need expensive repair as a result of damage during use or during a disinfection procedure. To overcome these and other problems, there is a need for a low cost imaging endoscope that can be used for a single procedure and thrown away. The scope should have better navigation and tracking, a superior interface with the operator, improved access by reduced frictional forces upon the lumenal tissue, increased patient comfort, and greater clinical productivity and patient throughput than those that are currently available.
SUMMARY OF THE INVENTIONTo address these and other problems in the prior art, the present invention is an endoscopic video imaging system. The system includes a control cabinet that includes a number of actuators that control the orientation of an endoscope and an imaging system to produce images of tissue collected by an image sensor at the distal end of the endoscope. A single use endoscope is connectable with the control cabinet and used to examine a patient. After the examination procedure, the endoscope is disconnected from the control cabinet and may be disposed.
The single use endoscope of the present invention includes a flexible elongate tube or shaft and an illumination source that directs light onto a tissue sample. An image sensor and objective lens assembly at or adjacent the distal end of the endoscope captures reflected light to produce an image of the illuminated tissue. Images produced by the sensor are transmitted to a display device to be viewed by an examiner. In one embodiment, an imaging assembly at the distal end of the endoscope includes an inexpensive and easy to assemble set of components that house one or more light emitting diodes (LEDs), an image sensor such as a CMOS solid state image sensor and a lens assembly. The LEDs are thermally coupled to a heat exchanger, which may be air or liquid cooled in order to remove excess heat generated by the LEDs.
The single use endoscope of the present invention also includes a steering mechanism such as a number of tensile control cables, which allow the distal end of the endoscope to be deflected in a desired direction. In one embodiment of the invention, a proximal end of the tensile control cables communicates with actuators within the control cabinet. A freestanding joystick or other directional controller generates electrical control signals which are sent by a processor within the control cabinet to compute signals to drive the actuators in order to orient the distal end of the endoscope in the direction desired by the examiner. In another embodiment of the invention, the distal end of the endoscope is automatically steered, based on analysis of images from the image sensor. The joystick or other directional controller may include tactile or other sensory feedback to alert the operator that the scope may be looped or positioned against a tissue wall.
In one embodiment of the invention, the endoscope includes an articulation joint that is comprised of a number of low cost, easily assembled pieces that allow the distal end of the scope to be bent in a desired direction by the control cables. In one embodiment of the invention, the articulation joint exerts a restoring force such that upon release of a tensioning force, the distal end of the scope will straighten.
In another embodiment of the invention, the endoscope has a variation in stiffness along its length that allows the distal end to be relatively flexible while the more proximal regions of the scope have increased column strength and torque fidelity so that a physician can twist and advance the endoscope with greater ease and accuracy and with fewer false advances (“loops”). Variation in stiffness along the length can be provided by varying the durometer rating of materials that comprise a shaft of the endoscope. Operator-controlled, variable stiffness can be provided by the control cables that can be tightened or loosened to adjust the stiffness of the shaft. In yet another embodiment, the spacing between the components that comprise the articulation joint is selected to provide a variation in stiffness along the length of the articulation joint.
In yet another embodiment of the invention, the endoscope is covered with a retractable sleeve that uncovers the distal end of the scope during use and extends over the distal end after the scope is removed from a patient.
In another embodiment of the invention, the scope is coated with a hydrophilic coating to reduce its coefficient of friction.
BRIEF DESCRIPTION OF THE DRAWINGSThe foregoing aspects and many of the attendant advantages of this invention will become more readily appreciated as the same become better understood by reference to the following detailed description, when taken in conjunction with the accompanying drawings, wherein:
FIGS. 1A and 1B are schematic illustrations of an endoscopic imaging system in accordance with the present invention;
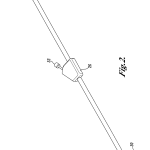
FIG. 2 illustrates further detail of a single use endoscope used in the endoscopic imaging system shown in FIG. 1A;
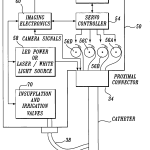
FIG. 3A is a block diagram of a control cabinet that interfaces with a single use endoscope in accordance with an embodiment of the present invention;
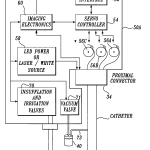
FIG. 3B is a block diagram of a control cabinet that interfaces with a single use endoscope in accordance with another embodiment of the present invention;
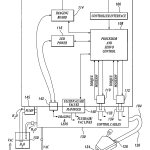
FIG. 3C is a block diagram of a control cabinet and a single use endoscope in accordance with another embodiment of the present invention;
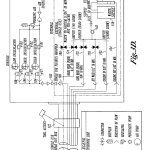
FIG. 3D is a fluidics diagram of a single use endoscopic imaging system shown in FIG. 3C;
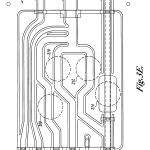
FIG. 3E illustrates a flexible manifold for use in an embodiment of a single use endoscope of the present invention;
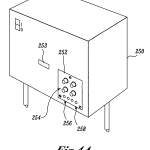
FIG. 4A illustrates an embodiment of a connector on a control cabinet for connecting to a single use endoscope;
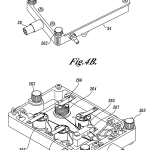
FIGS. 4B-4D illustrate an embodiment of a connector for connecting the proximal end of a single use endoscope to a control cabinet;
FIG. 4E illustrates another embodiment of a control cabinet with a connector for connecting to a single use endoscope;
FIG. 5A is a detailed view of one embodiment of a handheld controller for use with an endoscopic imaging system of the present invention;
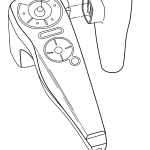
FIG. 5B illustrates a joystick style controller including a force feedback mechanism for use with an endoscopic imaging system of the present invention;
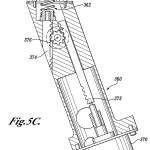
FIG. 5C illustrates one embodiment of a mechanism for providing force feedback to a joystick of the type shown in FIG. 5B;
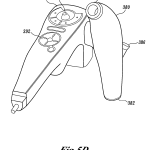
FIGS. 5D and 5E illustrate another embodiment of a breakout box and handheld controller of the present invention;
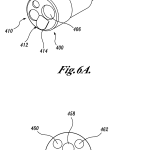
FIG. 6A illustrates an embodiment of a distal tip of a single use endoscope in accordance with the present invention;
FIGS. 6B-6I illustrate an embodiment of an imaging assembly for use with a single use endoscope of the present invention;
FIG. 7 illustrates one mechanism for terminating a number of control cables in a distal tip of an imaging endoscope;
FIG. 8 illustrates a single use endoscope having control cables that are routed through lumens in the walls of an endoscope shaft;
FIGS. 9A and 9B illustrate a transition guide that routes control cables from a central lumen of an endoscope shaft to control cable lumens in an articulation joint;
FIGS. 10A and 10B illustrate the construction of a shaft portion of an endoscope in accordance with an embodiment of the present invention;
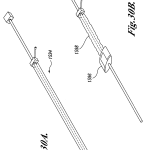
FIG. 11 illustrates one mechanism for providing a shaft with a varying stiffness along its length;
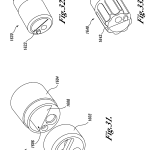
FIGS. 12A and 12B illustrate an extrusion used to make an articulation joint in accordance with an embodiment of the present invention;
FIG. 13 illustrates an articulation joint in accordance with an embodiment of the present invention;
FIGS. 14 and 15 illustrate an extrusion having areas of a different durometer that is used to form an articulation joint in accordance with another embodiment of the present invention;
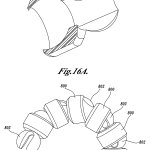
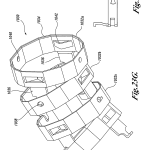
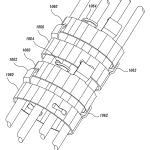
FIGS. 16A and 16B illustrate another embodiment of an articulation joint according to an embodiment of the invention including a number of ball and socket sections;
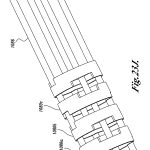
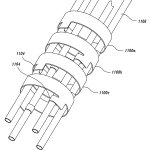
FIGS. 17A-17D illustrate various possible configurations of ball and socket sections used to construct an articulation joint;
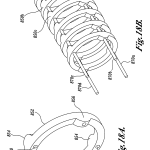
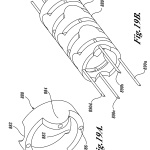
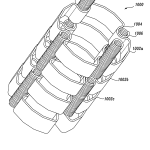
FIGS. 18A-18B illustrate an articulation joint formed of a number of stacked discs in accordance with another embodiment of the present invention;
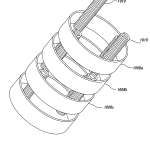
FIGS. 19A-19B illustrate a disc used to form an articulation joint in accordance with another embodiment of the present invention;
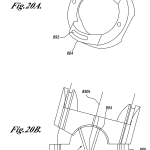
FIGS. 20A-20B illustrate a disc used to form an articulation joint in accordance with another embodiment of the present invention;
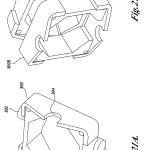
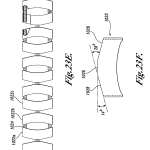
FIGS. 21A-21B illustrate a non-circular segment used to form an articulation joint in accordance with another embodiment of the present invention;
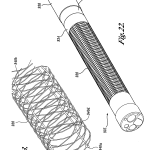
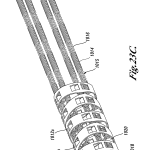
FIG. 22 illustrates an endoscope having a braided member as an articulation joint in accordance with another embodiment of the present invention;
FIG. 23 illustrates one possible technique for securing the ends of a control wire to a braided articulation joint shown in FIG. 22;
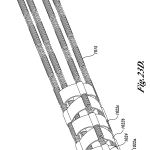
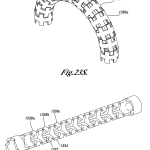
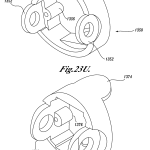
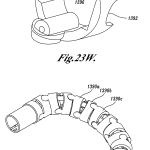
FIGS. 23A-23X illustrate additional embodiments of an articulation joint for use in a single use endoscope of the present invention;
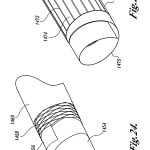
FIG. 24 illustrates an endoscope shaft having one or more memory reducing wraps in accordance with another embodiment of the present invention;
FIG. 25 illustrates an endoscope shaft including longitudinal stripes of a high durometer material in accordance with another embodiment of the present invention;
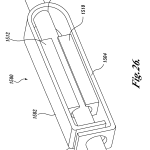
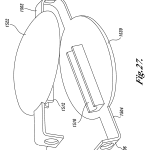
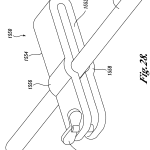
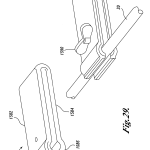
FIGS. 26-29 illustrate alternative embodiments of a gripping mechanism that rotates a single use endoscope in accordance with the present invention;
FIGS. 30A and 30B illustrate a retractable sleeve that selectively covers a single use endoscope in accordance with another embodiment of the present invention;
FIG. 31 illustrates an embodiment of a passive heat dissipating distal tip of a single endoscope in accordance with the present invention; and
FIGS. 32 and 33 illustrate alternative embodiments of a passive heat dissipating distal tip in accordance with the present invention.
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTAs indicated above, the present invention is an endoscopic video imaging system that allows a physician to view internal body cavities of a patient as well as to insert surgical instruments into the patient’s body. An imaging endoscope used with the present invention is sufficiently inexpensive to manufacture such that the endoscope can be considered a single use, disposable item.
As shown in FIG. 1A, an endoscopic video imaging system 10 according to one embodiment of the present invention includes a single use imaging endoscope 20, a control cabinet 50 and a handheld controller 80. The single use endoscope 20 has a distal tip 22 that is advanced into a patient’s body cavity and a proximal end 24 that is connected to the control cabinet 50. As will be explained in further detail below, the control cabinet 50 includes a number of actuators that control a steering mechanism within the endoscope 20 in order to change the orientation of the distal tip 22. A physician or their assistant uses the handheld controller 80 to input control signals that move the distal tip 22 of the endoscope 20. In addition, the control cabinet 50 may include connections to sources of air/gas and a flushing liquid such as water for clearing the endoscope 20. The control cabinet 50 also includes imaging electronics to create and/or transfer images received from an image sensor, and other patient data, to a video display (not shown) for viewing by a physician or technician.
In the embodiment shown, the single use endoscope 20 also includes a breakout box 26 that is positioned approximately midway along the length of the endoscope. The breakout box 26 provides an entrance to a working channel and may include an attachment point for a vacuum collection bottle 40 that collects liquids or debris received from a lumen within the endoscope. The vacuum collection bottle 40 is controlled by a vacuum valve 28 that is positioned on the breakout box 26. Alternatively, the valve can be positioned within the control cabinet 50 and controlled from the handheld controller 80.
If desired, the handheld controller 80 can be secured to the breakout box 26 such that the two units can be moved as one. Upon completion of a patient examination procedure, the single use endoscope 20 is disconnected from the control cabinet50 and disposed of. A new single use endoscope 20 is then connected to the control cabinet 50 for the next examination procedure to be performed.
The embodiment shown in FIG. 1A is a “parallel” configuration whereby the endoscope 20 and handheld controller 80 are separately plugged into different connectors of the control cabinet 50. This parallel configuration allows one operator to handle the endoscope while another operator can manipulate the handheld controller 80. Alternatively, the handheld controller 80may be secured to the endoscope 20 such that a single operator can control both. FIG. 1B illustrates a “serial” configuration of the invention. Here, the single use endoscope 20 is connected to the control cabinet 50 through the handheld controller 80.
FIG. 2 shows further detail of one embodiment of the single use endoscope 20. At the proximal end of the endoscope is a low torque shaft 24 and a connector 34 that connects the endoscope 20 to the control cabinet 50. Distal to the breakout box 26is a higher torque shaft. At the distal end of the endoscope 20 is the distal tip 22 that includes a light illumination port, an image sensor, an entrance to a working channel and a flushing port (not shown). Proximal to the distal tip 22 is an articulation joint 30 that provides sufficient flexibility to the distal section of the shaft such that the distal tip 22 can be directed over the required deflection range (180° or more) by the steering mechanism and can be directed to make that bend in any direction desired about the circumference of the distal tip. That is, the operator can select both the amount of bend or articulation and the direction of the bend.
As discussed above, the single use endoscope 20 in accordance with one embodiment of the invention, has a higher torque shaft at the distal section of the endoscope and a lower torque shaft at its proximal end. The breakout box 26 positioned along the length of the endoscope shaft can be used as a handle or gripper to impart rotation of the distal end of the endoscope during a medical examination procedure. The higher torque portion of the shaft transfers rotational motion that is imparted at a location near the distal tip in order to guide the distal tip of the endoscope. The lower torque shaft portion of the endoscope intentionally does not transfer torque as well for ease of manipulation and can twist when rotational motion is applied.
In use, the physician can insert a medical device such as a biopsy forceps, snare, etc., into an entrance to the working channel of the endoscope found on the breakout box 26. In alternate embodiments, the entrance to the working channel lumen may be positioned further towards the proximal end of the endoscope.
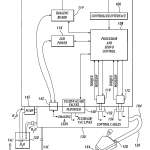
FIG. 3A is a block diagram of the major components included within one embodiment of the control cabinet 50. The control cabinet 50 is preferably mounted on wheels so that it can easily be placed near a patient prior to an examination procedure. The control cabinet is connected to a source of electrical power, either a.c. mains or a battery, as well as to a source of insufflation gas and irrigation liquid. Inside the control cabinet 50 is a controller interface 52 that is connected to the handheld controller 80 and receives control signals therefrom. To change the orientation of the distal tip of the endoscope, the control signals are received from a directional switch in the handheld controller 80. The control signals are supplied to a servo motor controller 54 that in turn controls a number of actuators, such as servo motors 56 a, 56 b, 56 c, 56 d. Each of the servo motors 56 a–56 d is connected to one or more control cables within the endoscope. Motion of the servo motors 56 a–56 dpulls or releases the control cables in order to change the orientation of the distal tip 22 of the endoscope 20. Although the embodiment shown in FIG. 3A shows four servo motors and control cables, it will be appreciated that fewer or more servo motors and corresponding control cables could be used to move the distal tip. For example, some endoscopes may use three control cables and three associated servo motors or two motors with four control cables.
An imaging electronics board 60 receives signals transmitted from an image sensor (not shown) and its associated electronics at the distal end of the single use endoscope. The imaging electronics board 60 can enhance the images received or can provide video effects such as zoom, color changes, highlighting, etc., prior to display of the images on a video display (not shown). Images of the tissue may also be analyzed by the imaging electronics board 60 and/or a separate processing circuit to produce control signals that are supplied to the servo motor controller 54 in order to automatically steer the distal tip of the endoscope as will be discussed in further detail below. Images produced by the imaging electronics board 60 may also be printed on a digital printer sent to a network server or store, saved to a computer readable media such as a floppy disc, CD, DVD, etc., or a video tape for later retrieval and analysis by a physician.
The imaging electronics board 60 also provides electrical power to a light source such as a number of light emitting diodes (LEDs) at the distal end 22 of the imaging endoscope. Alternatively, if the endoscope utilizes an external light source, then the motion control cabinet can include a light intensity light source such as a laser or arc lamp source that supplies light to a fiber optic illumination guide within the imaging endoscope 20 in order to illuminate an internal body organ. Either power source 58 may be controlled by signals received form the handheld controller 80 when the user desires to activate the light source or adjust the intensity of light produced.
Finally, the control cabinet 50 includes valves 70 that control the delivery of insufflation air/gas to insufflate a patient’s body cavity and an irrigation liquid to flush out a body cavity and/or clean the imaging light source and image sensor at the distal end of the endoscope. The insufflation air/gas and irrigation liquid are connected to the imaging catheter via a connector 38that connects to an irrigation/insufflation lumen of the endoscope 20. In one embodiment of the invention, the irrigation and insufflation lumen are the same lumen in the imaging catheter. However, it will be appreciated that separate irrigation and insufflation lumens could be provided if desired and if space in the endoscope permits.
FIG. 3B illustrates another embodiment of a control cabinet 50A that is similar to the cabinet shown in FIG. 3A. The control cabinet 50A includes a vacuum valve 71 that controls vacuum delivered to a vacuum collection bottle 40. A vacuum line 73connects to a vacuum lumen within the imaging endoscope 20. The vacuum valve 71 is controlled from the handheld controller80.
FIG. 3C illustrates another embodiment of a single use endoscopic imaging system in accordance with the present invention. The endoscopic imaging system 100 includes a control cabinet 102 that operates to control the orientation and functions of a single use endoscope 104. The control cabinet 102 includes a controller interface 106 that receives commands from an input device such as a joystick, that is used by a physician or their assistant to control the operation of the single use endoscope. Commands from the joystick are supplied to a programmable processor such as a digital signal processor that controls the overall operation of the imaging system and a servo control unit 108. The processor and servo control unit control the operation of a pair of servo motors 110, 112 that in turn drive control cables within the endoscope 104. The orientation of the distal tip is controlled in response to directional signals received from the user input device as well as feedback signals obtained from sensors that measure the position and torque of each of the servo motors 110, 112.
In one embodiment of the invention, the processor and servo control unit 108 implement a position-to-rate control that varies the speed at which the distal tip is moved as a function of the position of the directional switch on the user input device. However, other control algorithms such as position-to-position or position-to-force (i.e., acceleration) could also be implemented.
Another function performed by the processor and servo control 108 is to generate a graphic indication of the approximate articulation of the tip that is shown to the user on the video display. The processor receives feedback signals regarding the position of the servo motors from which the length of control cable shortening is determined as well as the torque required to move the cables. From these values, an approximation is made of the amount of articulation at the distal tip of the scope. The approximate articulation amount and the direction of articulation is displayed to the physician along with the images received from the image sensor, patient data, and/or other operating parameters of the endoscopic imaging system.
The processor and servo control unit 108 also implement a variable braking function that allows the servo motors 110, 112 to be back-driven by the physician moving the distal tip within the patient’s body. The variable braking is accomplished by having the physician or the processor select a variable braking threshold that is between 0 and the maximum torque that can be supplied by the motors. When the physician moves the scope, the torque on the motors is detected to see if it is greater than or equal to the variable braking threshold. If so, the processor and servo control unit 108 controls one or both of the servo motors 110, 112 such that the tip is moved to a new position so that the torque readings from the motors are less than the variable braking threshold.
In some instances, such as near delicate portions of the patient’s anatomy, the variable braking threshold will be set low so that little pressure is required to back-drive the motors. In other instances, the braking threshold can be set high where it is desired to maintain the shape of the hand in the scope for navigation, etc.
The control cabinet 102 also includes an imaging board 114 that produces images from the signals that are received from the image sensor at the distal end of the single use endoscope 104. The imaging board 114 deserializes the digital video signal from the CMOS images and performs the necessary algorithms such as demosaicing, gain control and white balance to produce a quality color image. The gain control of the system is implemented by adjusting the intensity of the illumination (current supplied to the LEDs) and adjusting the RGB gains to the CMOS imager. The imaging board 114 also includes isolation circuitry to prevent a patient from becoming shocked in the event of an electrical failure on the imaging board 114 or within the control cabinet 102 as well as circuitry for transmitting control signals to the image sensor and for receiving image signals from the image sensor. In one embodiment of the invention, the imaging board 114 is provided on a standard PC circuit board to allow individual endoscopes to be tested with a personal computer and without the need for an additional control cabinet 102.
In the embodiment shown in FIG. 3C, the single use endoscope 104 has a distal shaft portion 120 that is connected to the breakout box 122 with a swivel connection 124. In addition, the proximal portion 126 of the shaft is connected to the breakout box 122 with a second swivel connection 128. The swivel connections 124, 128 allow the distal and proximal ends of the endoscope to rotate with respect to the breakout box 122 and without twisting the breakout box 122 in the hands of the physician or their assistant.
In the embodiment shown, the single use endoscope 104 is connected to the control cabinet 102 with a connector 130. Within the connector 130 are a pair of spools 132, 134 that are engageable with the driveshafts of the servo motors 110, 112. Each spool 132, 134 drives a pair of control cables in opposite directions. One pair of control cables drives the distal tip of the endoscope in the up and down direction, while the other pair of control cables drives the distal tip of the endoscope in the left and right direction.
The connector 130 also includes a manifold 140 that controls the supply of fluid, air and vacuum to various tubes or lumens within the endoscope 104. In addition, the connector 130 includes an electrical connector 142 that mates with the corresponding electrical connector on the control cabinet 102. The connector 142 transfers signals to and from the image sensor and thermal sensor as well as power to the illumination LEDs. Water is supplied to the endoscope with a pump 145. The pump 145 is preferably a peristaltic pump that moves water though a flexible tube that extends into the proximal connector 130. Peristaltic pumps are preferred because the pump components do not need to come into contact with the water or other fluids within the endoscope and it allows the wetted component to be single use. A water reservoir 150connected to the pump 145 supplies water to cool the illumination LEDs as well as to irrigate the patient. The water supplied to cool the LEDs is returned to the reservoir 150 in a closed loop. Waste water or other debris are removed from the patient with a vacuum line that empties into a collection bottle 160. Control of the vacuum to the collection bottle 160 is provided at the manifold 140 within the proximal connector 130.
FIG. 3D is a fluidics diagram of the single use endoscope 104 as shown in FIG. 3C. As indicated above, a water supply 150, such as a bag of sterilized water or saline, is used to supply water to the endoscope with a peristaltic pump 142. The water is pumped into a tube 162 that delivers the water to a heat exchanger coupled to the LED illumination source. Water returning from the heat exchanger is received in a tube 164 and passed through a flow meter 166 back to the reservoir 150. In the current embodiment of the invention, water is continually pumped through the heat exchanger to prevent the illumination sources from becoming too hot in the patient’s body. The flow meter 166 provides a signal if water is not being pumped through the heat exchanger so that the physician may decide to remove the endoscope from the patient.
In addition to providing cooling, water can be selectively applied to a tube 170 that provides a high pressure lavage for irrigating a patient lumen, as well as a lens wash tube 172 that cleans contaminants from the front of an imaging lens at the distal end of the endoscope. Water can also be selectively applied to a tube 174 that is connected to a working channel tube of the endoscope to clean the working channel, if necessary. The flow of water in each of the tubes 170, 172, 174 is selectively controlled by an associated valve which allows water to be pumped through the tube if desired. A valve 180 applies vacuum to a working channel tube in the endoscope to remove irrigation liquid, debris, or other contaminants from the patient, if desired. A valve 182 supplies air or other bio-compatible gas to an insufflation lumen, which in an embodiment of the invention is the same tube as the lens wash tube 172 at the distal end of the endoscope. The air can be provided to the patient under a variety of pressures using solenoid valves 184, 186, 188 in line with regulators that provide air at different pressures and are connected in parallel to an air or gas source. The pressure of air delivered to the lens wash tube 172 can be adjusted by selectively opening a combination of the valves 184, 186, 188. A check valve 189 is in line with the air supply line to prevent any back flow of air or liquids from the endoscope into the air delivery mechanism.
FIG. 3E shows one embodiment of a manifold 140 that directs air, water and/or vacuum to the various tubes or lumens within the endoscope. In one embodiment of the invention, the manifold is formed of two sheets of a thermoplastic material such as polyurethane that are RF welded or otherwise bonded to form a series of passages between the sheets. Pinch valves are placed over the passages and are selectively opened or closed to control the delivery of fluids, air or vacuum to the different tubes in the endoscope. In one embodiment, the manifold 140 has three connectors on one side and six connectors on the other side. On one side, a connector 190 receives water from the water reservoir 150. A connector 192 is connected to a tube that returns the water from the heat exchanger at the distal tip to the water reservoir 150, and a connector 194 is connected to a collection jar 160 that is in-line with the vacuum source. Pinch valves are preferred because the valve components do not need to come into contact with the water or other fluids within the endoscope and they allow the wetted component to be single use.
On the other side of the manifold, a connector 196 is connected to the working channel to supply water to or apply vacuum to the working channel. A connector 198 is connected to the lens wash tube. A connector 200 is connected to the high pressure lavage tube in the endoscope. Connectors 204 and 206 are connected to the tubes that supply water to and return water from the heat exchanger that cools the LED illumination sources.
Water entering the manifold at the connector 190 is allowed to flow in four different paths. Fluid flow through three of the paths is selectively controlled with solenoid valves that pinch the manifold 140 at locations 208, 210, 212 that are over the passages in the manifold. In the present embodiment of the invention, water is always pumped through the heat exchanger that cools the LED illumination sources. By selectively activating the solenoid valves at the locations 208, 210, 212, water can be supplied to the other tubes in the endoscope.
In addition, the manifold 140 includes a tube or other straw-like structure that maintains the passage open between the connectors 196 and 194 such that vacuum does not collapse the manifold 140 when a solenoid valve that is at a location 214between the connectors 194 and 196 is released. The tube or straw also includes at least one perforation (not shown) to allow liquid to flow into the working channel. The tube is perforated so that water can flow into the working channel if desired.
After use, the manifold 140 is removed from the tubes that supply water and vacuum, etc., and is thrown away with the rest of the single use endoscope. The flexible manifold bag 140 forms an inexpensive device for controlling the application of fluids or air to the endoscope while preventing the fluids from coming in contact with non-disposable portions of the endoscopic imaging system itself. FIG. 4A illustrates one embodiment of a connector for securing the proximal end of the single use endoscope to a control cabinet 250 prior to performing an endoscopic examination. The control cabinet 250 includes an exterior connector 252 having a number of shafts 254 that are coupled to the servo motors of the type shown in FIGS. 3A and 3B. Each shaft 254 is shaped to be received in a corresponding spool on which the control cables are wound. Also included in the connector 252 are connections to the insufflation and irrigation valves 256 and a vacuum valve 258 to provide air, water and vacuum to the endoscope.
FIGS. 4B and 4C illustrate one embodiment of a connector 260 used to secure the proximal end of the endoscope 20 to the control cabinet 250. The connector 260 includes a number of thumbscrews 262 or other quick release mechanisms that allow the connector 260 to be easily secured to the exterior connector 252 on the exterior of the control cabinet 250. As shown inFIG. 4C, the connector 260 includes a number of spools 262 about which the control cables are wound. Each spool is preferably threaded or grooved to prevent the control cables from binding on the spool during use. A cover 265 may surround a portion of the spool to keep the control cables against the spool and within the groove and to aid in supporting the spool within the connector 260. In one embodiment of the invention, the spools are prevented from rotating and thus the cables from unwinding when the connector 260 is not engaged with the control cabinet 250 by brakes 266 having pins that fit within corresponding slots in the spools. Once the connector 260 is mounted to the control cabinet 250, the brakes 266 are disengaged from the spools such that the spools can be moved by the servo motors. A clamp 267 can be used to secure the proximal end on an outer jacket that covers the control cables. Electrical connections for the light sources and image sensor as well as connections to the air and water valves are found on the sides of the connector 260 or on the rear face of the connector 260 to engage the valves, as shown in FIG. 4A.
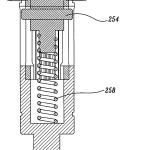
FIG. 4D illustrates a cross-sectional view of a splined shaft 254 fitted within a spool 262 with a splined bore. The shaft 254 is supported by a cylinder 256 having a spring 258 therein such that the shaft 254 is free to move within the cylinder 256. The cylinder 256 is coupled to the servo motors within the control cabinet. The spring 258 allows the shaft 254 to float such that the shaft can more easily align and engage the mating surface of the spool 262 when the connector is attached to the control cabinet 250.
Upon insertion of the shaft 254 into the spool 262, the brake 266 is released, thereby allowing the spool 262 to be moved by rotation of the cylinder 256. In some instances, the brake 266 may be omitted, thereby allowing the spools 262 to freely rotate when the connector 260 is not engaged with the control cabinet 250.
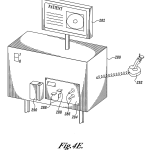
FIG. 4E illustrates another embodiment of a control cabinet 280 having a display 282 upon which a graphical user interface including patient data and video or still images produced from the endoscope are displayed. A connector 284 is provided on the exterior of the control cabinet 280 for connecting the proximal end of the single use endoscope. The connector 284includes a number of shafts 286 that are coupled to the servo motors within the control cabinet. A number of pinch valves 288are provided to control the flow of air, water, and vacuum through the manifold that connects the fluid reservoir, vacuum source, and air supply (not shown) to the tubes in the endoscope. A peristaltic pump 290 is provided for pumping liquid through the single use endoscope as described above. A joystick handheld controller 292 is connected to the control cabinet280 so that an operator can enter commands concerning the operation of a single use endoscope and its orientation.
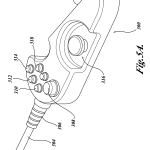
FIG. 5A illustrates various controls located on one embodiment of a handheld controller 300 in accordance with the present invention. The handheld controller 300 includes a controller body 302 that, in the parallel embodiment of the invention, is coupled to a control cabinet by an electrical cord 304, a wireless radio frequency channel, an infrared or other optical link. If the connection is made with an electrical cord, a strain relief 86 is positioned at the junction of the electrical cord 304 and the body 302 of the controller to limit the bending of the electrical wires within the electrical cord 304. In the serial embodiment of the invention, the connection of the handheld controller 300 to a control cabinet is made with a conductor that includes both the wires to transmit signals to the motion controllers and imaging system, as well as lumens to carry the insufflation air/gas and irrigation liquid. In addition, the control cables of the endoscope engage cables that are connected to the actuators in the motion control cabinet through the handheld controller 300.
Positioned in an ergonomic arrangement on the handheld controller 300 are a number of electrical switches. An articulation joystick 308 or other multi-positional device can be moved in a number of directions to allow the physician to orient the distal tip of the imaging endoscope in a desired direction. In order to guide the imaging endoscope manually, the physician moves the joystick 308 while watching an image on a video monitor or by viewing the position of the distal tip with another medical imaging technique such as fluoroscopy. As the distal tip of the endoscope is steered by moving the joystick 308 in the desired direction, the physician can push, pull and/or twist the endoscope to guide the distal tip in the desired direction.
A camera button 310 is provided to capture an image of an internal body cavity or organ in which the single use endoscope is placed. The images collected may be still images or video images. The images may be adjusted for contrast or otherwise enhanced prior to display or stored on a recordable media.
An irrigation button 312 activates an irrigation source to supply a liquid such as water through an irrigation lumen of the single use endoscope. The liquid serves to clean a window in front of an image sensor and/or the light source at the distal end of the endoscope as well as an area of the body cavity. An insufflation button 314 is provided to activate the insufflation source to supply air/gas through a lumen of the endoscope. The supply of the insufflation gas expands portions of the body cavity around the distal tip of the endoscope so that the physician can more easily advance the endoscope or better see the tissue in front of the endoscope.
In one embodiment of the invention, the body 302 of the handheld controller 300 also includes a detachable joint such as a thumb screw 316 for securing the handheld controller 300 to the breakout box as indicated above. A corresponding socket or set of threads on a breakout box receive the thumb screw 316 in order to join the two parts together. One or more additional buttons 318 may also be provided to activate additional functions such as recording or printing images, adjusting light intensity, activating a vacuum control valve or providing a variable braking drag on the control cables that provide the up, down, left, right movement of the distal tip, etc., if desired.
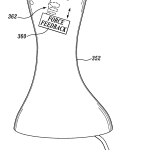
FIG. 5B illustrates another embodiment of a hand held controller by which the operator can enter commands to control the operation of the control cabinet and single-use endoscope. The controller 350 includes a handle 352 that is ergonomically shaped to allow the user to control the operations with their thumb and/or fingers. A joystick 354 is located on the top of the controller 350 such that the user can steer the endoscope by moving the joystick with their thumb. A number of control buttons 356 can be activated with the user’s thumb or fingers to control other operations of the endoscope such as supplying air for insufflation or water/vacuum to the lumens in the endoscope adjusting the illumination source intensity, etc. The controller 350 also includes a force feedback mechanism 360 that applies a variable force to a spring 362 that biases the joystick 354. The force applied by the feedback mechanism 360 is varied in proportion to the torque required to steer the endoscope. For example, the endoscope may be positioned against a tissue wall, or may have a number of loops along its length. Therefore, the user can be given a tactile indication of the force required to steer the endoscope by varying the force placed on the spring 362 by the feedback mechanism 360.
As indicated above, in one embodiment of the invention, the servo motors implement a position-to-rate control algorithm, whereby the position of the joystick 354 is translated into a rate of change of position in a desired direction in the distal tip. Therefore, as the user presses the joystick in any direction, the return force that is applied by the force feedback mechanism360 to the spring 362 can be varied as a function of the torque required to move the control cable and varying the force on the spring also varies the force that the spring applies to the joystick. The force that the spring applies to the joystick is felt by the user through the joystick and gives the user a tactile indication of the level of force being applied to move the distal tip in the direction being commanded by the user.
FIG. 5C illustrates one mechanism for providing a force feedback mechanism 360 within the handheld controller 350. Within the joystick is a motor 370 that drives a rack and pinion mechanism including a first rack 372 that is directly coupled to the motor 370 and a second rack 374 that is directly coupled to the pretension spring 362. Rotation of the motor 370 drives a screw-type mechanism (not shown) which moves the first rack 372 up or down. A pinion gear 376 translates longitudinal motion of the first rack 372 into longitudinal motion of the second rack 374, which in turn adjusts the pretension on the spring362. In the embodiment shown, two racks are needed due to the orientation of the joystick with respect to the longitudinal axis of the hand held controller 350. However, other configurations could be used if the joystick were oriented differently in the hand held controller.
Similarly, a plastic material can be used to replace the spring entirely and a force can be applied to one area of the plastic material to create a similar force where the plastic contacts and biases the joystick. In this way, the plastic is being used like a hydraulic fluid to transmit force from one location to another. However, unlike a hydraulic fluid, the plastic avoids the problem of liquid handling and liquid proof seals. Similarly, variable torque motors can be coupled directly to the joystick and the torque of the motors adjusted in accordance with the tension of the control cables to directly transmit a force through the joystick to the user. The use of two motors with the motors acting on orthogonal respective axes of the joystick movement can create force feedback signals in response to all possible directions of joystick movement. This sort of use and arrangement of direct drive motors can be similarly used to feedback position of the distal tip. In this arrangement, position controlled motors would be used instead of torque controlled motors. The positions of the control cables or the positions of the servo motors driving these cables are used to compute the approximate position of the distal tip. The position controlled motors are driven to make the joystick position follow the computed position of the distal tip. If the operator attempted to move the tip and the motion of the tip were blocked by its environment, then the operator’s movement of the joystick would be resisted by forces applied by the position controlled motors to make the joystick position correspond with the tip position.
Although the embodiment shown discloses a motor and a rack and pinion gear system to change the compression of the spring 362 that biases the joystick 354, it will be appreciated that other mechanisms including hydraulic, or magnetic actuators could be used. Alternatively, pseudo-fluid devices such as thermoplastics can be used. By selectively compressing a thermoplastic material, its elasticity can change and be used to apply different pressures on a spring 362.
In another embodiment, not all the forces on the wires are fed back to a user. In one embodiment, the system distinguishes the resistance of the shaft versus the resistance at the distal tip and only the resistance at the distal tip is fed back to a user.
To distinguish the forces on the shaft versus the forces at the tip, the tip is dithered in different directions. If the resistance is on the tip, then the resistance should be high only in one direction. If resistance is caused by loops in the shaft, then resistance should be equal in all directions. By comparing the forces in a processor and separating the forces required to move the distal tip, high forces can be prevented from building up at the tip. High motor torque can be used only to overcome resistance due to looping and not employed to bend the tip if it meets resistance. Therefore, higher forces are presented from being built up on the tip and reducing the risk that the tip will snap into position.
FIGS. 5C AND 5D illustrate another embodiment of a breakout box and handheld controller. In this embodiment, a handheld controller 380 has a distal end 382 and a proximal end 384. The controller is generally “banana-shaped” such that it fits ergometrically in a user’s hand. In addition, the proximal end 384 of the controller 380 is oriented such that when the user has the controller in their hand and their palm is oriented horizontally with respect to the floor, the proximal end is pointed downwards toward the floor. Therefore, the proximal end of the endoscope shaft extending from the breakout box is angled away from the physician’s forearm and is less likely to get in the way.
The handheld controller 380 also includes an entrance to the working channel 386 having a cap thereon. The cap is positioned such that the entrance to the working channel does not face the physician in order to lessen the chances of the physician or nurse being splashed with bodily fluids or other contaminants. By removing the cap, a user can insert a tool into the working channel for receiving biopsies, applying medication, or performing other medical procedures.
Selectively coupled to the breakout box 380 is a handheld controller 388. The handheld controller includes a directional switch 390 that controls the orientation of a distal tip of the endoscope. Further buttons or controls 392 may be provided to allow the user to activate additional features of the endoscope or change operating parameters of the endoscopic imaging system.
As shown in FIG. 5D, the handheld controller 388 is selectively coupled to the breakout box 380 by cooperating male and female joining mechanisms 396, 398. In the embodiment shown, the joining mechanisms comprise a tab which is elastically received in a corresponding slot. However, other attachment mechanisms could be used.
In other embodiments, the handheld controller may be fitted to a gripping mechanism that grasps the distal portion of the shaft. The operator can therefore secure the handheld controller to the shaft at various positions along its length in order to allow the physician to be closer to the patient.
Although the disclosed embodiments of the endoscope generally require an operator to control the orientation of the distal tip, the single use endoscope of the present invention may also be steered automatically. Images received by the imaging electronics are analyzed by a programmed processor to determine a desired direction or orientation of the distal tip of the endoscope. In the case of a colonoscopy, where the endoscope is advanced to the cecum, the processor controls the delivery of insufflation air/gas to inflate the colon. The processor then analyzes the image of the colon for a dark open lumen that generally marks the direction in which the scope is to be advanced. The processor then supplies control instructions to the servo controller such that the distal tip is oriented in the direction of the dark area so located.
In other modes, a processor in the control cabinet causes the distal tip of the endoscope to move in a predefined pattern. For example, as the scope is being withdrawn, the distal tip may be caused to move in a spiral search pattern such that all areas of a body cavity are scanned for the presence of disease. By using the automatic control of the distal tip, a physician only has to advance or retract the scope to perform an examination.
As will be described in further detail below, the single use endoscope generally comprises a hollow shaft having one or more lumens formed of polyurethane or polyethylene tubes which terminate at the distal tip. In addition, the tube for the working channel may be reinforced with a spiral wound wrap. As shown in FIG. 6A, one embodiment of a distal tip 400 comprises a cylinder having a distal section 402 and a proximal section 404. The proximal section 404 has a smaller diameter than the diameter of the distal section 402 in order to form a stepped shoulder region. The diameter of the shoulder is selected that shaft walls of the endoscope can seat on the shoulder region to form a smooth outer surface with the distal section 402. The distal face of the distal tip 400 includes a number of ports, including a camera port 406, one or more illumination ports 408, an access port for the working channel lumen 410, and a directional flush port 412.
Fitted within the camera port 406 is an image sensor (not shown) that preferably comprises a CMOS imaging sensor or other solid state imaging device and one or more glass or polymeric lenses that produces electronic signals representative of an image of the scene in front of the camera port 406. The image sensor is preferably a low light sensitive, low noise, CMOS color imager with VGA resolution or higher such as SVGA, SXGA, or XGA. If less resolution is desired, a ½ VGA sensor could also be used. For conventional video systems, a minimum frame rate of 25 to 30 fps is required to achieve real-time video. The video output of the system may be in any conventional digital or analog format, including PAL or NTSC, or high definition video format.
The illumination ports 408 house one or more lenses and one or more light emitting diodes (LEDs) (not shown). The LEDs may be high intensity white light sources or may comprise colored light sources such as infrared (IR) red, green, blue or ultra-violet (UV) LEDs. With colored LEDs, images in different spectral bands may be obtained due to illumination with any one or more individual colors. White light images may be obtained by the simultaneous or sequential illumination of the colored LEDs and combining individual color images at each illumination wavelength. If sequential illumination of colored LEDs is employed, as an alternative, a monochrome CMOS imager can be used. As an alternative to LEDs, the light source may be external to the endoscope and the illumination light delivered to the illumination port with a fiber optic bundle.
The access port 410 is the termination point of the working channel or lumen of the single use endoscope. In one embodiment, the proximal end of the working channel terminates at the breakout box 26 as shown in FIG. 2. However, the working channel could terminate nearer the proximal end of the endoscope.
The directional flush port 412 includes a cap 414 that directs liquid and air supplied through an irrigation and insufflation lumen across the front face of the distal tip 400 in the direction of the camera port 406 and/or the illumination ports 408. The cap 414 thereby serves to rinse and dry the camera port 406 and the illumination port 408 for a better view of the internal body cavity in which the endoscope is placed. In addition, the flushing liquid cleans an area of tissue surrounding the distal end of the endoscope.
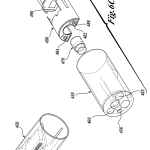
FIGS. 6B-6I illustrate another embodiment of an imaging assembly that forms the distal tip of the disposable endoscope in accordance with the present invention. As indicated above, the imaging assembly must be low cost, compatible with inexpensive assembly, and perform comparably to more expensive imaging mechanisms such that a doctor can use the endoscope to examination patients.
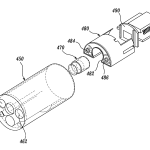
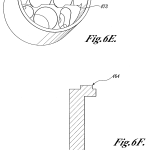
As shown in FIG. 6B, the distal end of the endoscope includes a distal cap 450 having a number of openings on its front face. The openings include an opening to a working channel 452 and an opening 454 for a low pressure lavage, whereby a stream of liquid can be delivered through the endoscope for removing debris or obstructions from the patient. A lens wash and insufflation port includes an integrated flush cap 456 that directs water across the lens of an image sensor and delivers an insufflation gas to expand the lumen in which the endoscope is inserted. Offset from the longitudinal axis of the endoscope is a lens port 458 that is surrounded by a pair of windows or lenses 460 and 462 that cover the illumination sources.
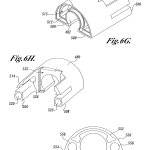
As best shown in FIG. 6C, the imaging assembly includes the distal cap 450, a cylindrical lens assembly 470, and a heat exchanger 480. The heat exchanger 480 comprises a semi-circular section having a concave recess 482 into which the cylindrical lens assembly 470 can be fitted. The concave recess 480 holds the position of the lens assembly 470 in directions perpendicular to the longitudinal axis of endoscope, thereby only permitting the lens assembly 470 to move along the longitudinal axis of the endoscope. Once the lens assembly is positioned such that it is focused on an image sensor 490 that is secured to a rear surface of the heat exchanger 480, the lens assembly is fixed in the heat exchanger with an adhesive. A pair of LEDs 482, 484 are bonded to a circuit board which is affixed in the heat exchanger such that a channel is formed behind the circuit board for the passage of a fluid or gas to cool the LEDs. A circuit board or flex circuit 492 containing circuitry to transmit and receive signals to and from the control unit is secured behind the image sensor 490 and to the rear surface of the heat exchanger 480. With the lens assembly 470, the LEDs 480, 482, the image sensor 490, and associated circuitry 492 secured in the heat exchanger 480, the heat exchanger assembly can be fitted within the distal cap 450 to complete the imaging assembly as shown in FIG. 6D.
FIG. 6E is a rear isometric view of the distal cap 450. The distal cap 450 is preferably precision molded out of an ABS plastic material. As indicated above, the front face of the distal cap 450 includes an integrated flush cap 456 and pair of windows 460that are positioned in front of the LEDs. Preferably, the windows are made of a clear plastic material which are overmolded with the remainder of the distal cap 450. Also within the inside of distal cap 450 is a flat surface 473 that extends proximally, thereby dividing the cylindrical inner surface of the distal cap into a semicircular tube into which the semicircular heat exchanger 480 assembly can be fitted. A protrusion 472 extends from the inside front face of the distal cap 450 and is aligned with a front face of the heat exchanger 480 to limit the extent to which the heat exchanger 480 can be inserted into the distal can 450.
FIG. 6F is a cross-sectional view of the windows 460, 462 that are positioned in front of the LEDs. The windows 460 are preferably molded of an optically clear plastic material with an outwardly extending flange 464 that secures the window 460 in front face of the distal cap 450. Once the windows have been molded, the distal cap 450 can be molded over the windows460, 462 in order to secure them in place.
FIG. 6G is a front isometnc view of the heat exchanger 480 portion of the imaging assembly. As indicated above, the heat exchanger is a semicircular section having a relatively flat bottom surface 500 that mates with the flat surface 473 in the inside of distal cap 450 and a rounded upper surface 502. The interior of the heat exchanger is generally hollow to form a channel 515 through which a cooling liquid or gas can be passed to cool the illumination LEDs. The concave recess 482 is formed in the bottom flat surface 500 of the heat exchanger to receive the cylindrical lens assembly 470, as shown in FIG. 6C. Extending rearwardly from the heat exchanger 480 are a of legs 506, 508 having holes therein that are fluidly connected to the interior of the heat exchanger 480. A lip 512 extends around the inside surface of the front face of the heat exchanger482 to form a bonding surface on which a correspondingly shaped circuit board can be fitted and adhesively secured. In some embodiments of the invention, the heat exchanger 480 may further include additional rearwardly extending fins 514,516 that positioned over the legs 506, 508 such that a slot is formed therebetween for seeming a circuit board or other components to the heat exchanger. However, in some embodiments, the fins 514,516 may be omitted.
FIG. 6H is a rear isometric view of the heat exchanger 480. As indicated above, each of the legs 506, 508 include a lumen520, 522 into which a tube can be fitted and through which cooling liquid or gas can be passed such that the liquid or gas flows within the hollow semicircular channel section of the heat exchanger. In addition, the heat exchanger 480 may include a recess 526 for a thermistor or other temperature-sensing device that can feed signals indicative of the temperature of the light emitting diodes and signal to a processor in the control unit.
FIG. 6I illustrates a semicircular circuit board 550 that is designed to fit within the front face of the heat exchanger 480. Specifically, the circuit board 550 is adhesively secured in the front face of the heat exchanger 480 against the inner lip 512, as shown in FIG. 6G. The circuit board comprises a base material that is thermally conductive, metal or ceramic, an electrically isolating dielectric material and a circuit layer. The circuit board 550 includes one or more traces 552 and bonding pads 554 that are used to deliver electrical current to a pair of LEDs that are located on thermally conductive pads 556, 558that are positioned on either side of the concave recess 482 in which the lens assembly 470 is fitted when the circuit board is installed in the heat exchanger 480.
In one embodiment of the invention, the base material is copper with conductive pads 556, 558 also made of copper. The LEDs are wire bonded to the bonding pads 554, and trace 552. The rear surface of the circuit board 550 is preferably coated with a heat conductive, non-reactive biocompatible material such as gold that is directly exposed to a cooling liquid or gas which is pumped through the heat exchanger via the legs 506, 508.
In a presently preferred embodiment of the invention, the LEDs 484, 486 are preferably large area die, high power, blue light LEDs coated with a phosphor material that together produce approximately 60 lumens of light. Although the embodiment shows two LEDs on either side of the lens assembly 470, it will be appreciated that additional LEDs could be used and corresponding changes made to the shape of the windows 460, 462 positioned in front of the LEDs.
As an alternative, the inside surface of the windows 460, 462 can be coated with a phosphor coating that produces a white light when exposed to the blue light that is produced by the LEDs. The particular phosphor selected may depend on the spectral characteristics of the LEDs employed. The phosphor can be mixed with an epoxy adhesive that is applied to the rear surface of the windows 460, 462 and cured by passing the distal tip 450 over an ultraviolet light source. Mixing the phosphor coating in an adhesive promotes a uniform distribution of the phosphor and is easy to manufacture.
The lens assembly 470 preferably comprises a group of plastic lenses that provide 140° field of view with f-theta distortion and an f/8 aperture. In accordance with the FDA Guidance document for Endoscopes, the resolution of the lenses should be 5 line pairs per millimeter or better for an object 10 mm distant from the distal tip. The individual lenses and aperture of the lens assembly are contained in a plastic cylinder for insertion into the cylindrically shaped hole of the heat exchanger 480. The front surface of the lens assembly is adhesively sealed to the lens port 458 in the cap 450.
In a preferred embodiment of the invention, the image sensor 490 comprises a VGA CMOS image sensor with 640×480 active pixels and an on-chip serializer that transmits image data to the control cabinet in a serial form. Such a CMOS image sensor is available as Model No. MI-370 from Micron Electronics of Boise, Id. In order to transmit serial image data and control signals along the length of the endoscope, the data and control signals are preferably sent differentially along a pair of twisted micro coaxial cables.
To construct the image assembly, the distal cap 450, including flushing port 456 is molded of ABS plastic over the LED windows 460, 462. The circuit board 550, having LEDs 482, 484 bonded thereto, is secured within the heat exchanger 480and the CMOS sensor 490 and associated electronics 492 are secured to the rear surface 525 of the heat exchanger 480between the legs 506, 508. The lens assembly 470 is inserted into the concave recess 482 and adjusted longitudinally until it is at the optimum position to focus light on the image sensor 490 before being cemented in place. The completed heat exchanger assembly can then be inserted into the distal tip 450 and adhesively bonded to complete the imaging assembly. The remaining tubes for the low pressure lavage bolus wash channel 454, lens wash and insufflation channel and working channel are then secured to corresponding lumens in the distal tip in order to complete the distal imaging section of the single use endoscope.
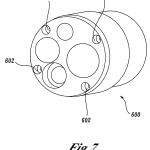
FIG. 7 shows further detail of an embodiment of a distal tip 600 of the imaging endoscope that is similar to that shown in FIG. 6A. In this embodiment, the tip section 600 includes a number of counter bored holes 602 that are positioned around the outer circumference of the distal tip 600. The counter bored holes 602 receive swaged or flanged ends of the control cables (not shown) that orient the distal tip. Tension on the control cables pull the distal tip 600 in the direction of the tensioning force.
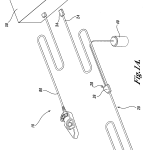
FIG. 8 is a lengthwise, cross-sectional view of a single use endoscope 650 in accordance with one embodiment of the present invention. A distal tip 652 is adhesively secured, welded or otherwise bonded within a center lumen at the distal end of an articulation joint 654. Secured to the proximal end of the articulation joint 654 is a distal end of a shaft 656. As discussed above, the shaft 656 is preferably stiffer or of greater torsional stiffness or is better able to transmit torque towards the distal end of the endoscope than at the proximal end of the endoscope.
The control cables 658 that move the distal tip of the endoscope are preferably made of a non-stretching material such as stainless steel or a highly oriented polyethylene-theralate (PET) thread string. The control cables 658 may be routed within a center lumen of the shaft 656 or, as shown in FIG. 8, may be routed through lumens formed within the walls of the shaft 656. The control cables 560 extend through guides within the walls of articulation joint 654 and terminate either at the distal end of the articulation joint 654 or in the distal tip section 602. In a presently preferred embodiment of the invention, the control cables are stainless steel Bowdin cables having an outer stainless steel jacket having a lubricous liner such as HDPE and an inner cable coated with a lubricant such as silicone in order to reduce friction. The distal end of the outer jacket is received in the proximal end of the articulation joint 654 while the proximal end of the jacket is secured in the connector that mates the single use endoscope to the control cabinet.
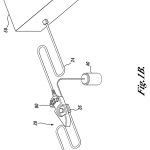
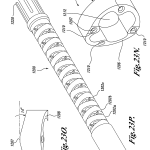
If the control cables are routed through the center lumen of the shaft 656, the cables are preferably carried in stainless steel or plastic spiral wrapped jackets to prevent binding and a transition guide 670 such as that as shown in FIGS. 9A and 9Bmay be used to guide the control cables into the proximal end of the articulation joint. The transition guide 670 has a proximal end 672 that is secured within a lumen of the distal end of the shaft. A central body portion 674 of the transition guide 670has a diameter equal to the outer diameter of the imaging endoscope. In addition, the body portion 674 includes a number of diagonal lumens 678 that extend from a center lumen of the proximal end 672 to an outer surface of a stepped distal end 676of the transition guide. The distal end 676 is secured within a proximal end of the articulation joint 654. Control cables in the diagonally extending lumens 678 are therefore guided to the outer edge of the catheter where they extend through the guides or control cable lumens of the articulation joint 654.
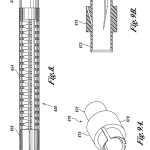
FIGS. 10A and 10B illustrate one embodiment of a shaft that is used to form a single use imaging endoscope. The shaft 680has an extruded sleeve 682 that may include a wire or other braid 684 embedded therein. The braid 684, if present, allows the torque characteristics of the shaft to be adjusted. The sleeve 682 may be formed by placing a sleeve over a mandrel. The braid 684 is placed over the sleeve and the mandrel is dipped into or sprayed with a coating material. Preferably the sleeve and coating material are made of polyurethane or other materials of established biomedical use biocompatible materials such as polyethylene, polypropylene or polyvinyl alcohol. In a currently preferred embodiment, the sleeve 682 is made of EG-80A durometer polyurethane with an outside diameter of 0.507 inches and an inside diameter of 0.460 inches. The stainless steel braid is embedded therein and has 23 picks per inch. In addition, the interior lumen(s) and exterior of the shaft can be coated with an extrudable, hydrophilic, lubricious coating such as the HYDROPASS™ hydrophilic coating available from Boston Scientific Corporation, of Natick, Mass., and described in U.S. Pat. Nos. 5,702,754 and 6,048,620, which are herein incorporated by reference.
A plastic spiral wrap 686 such as spiral wire wrap available from Panduit Inc. is inserted into a center lumen of the shaft 680. The spiral wrap 686 prevents the shaft 680 from crushing as it is bent around curves of a patient’s anatomy.
In one embodiment of the shaft 680, the spiral wrap has a thickness of 0.060 inches and a pitch of 3/16 inch. The spiral wrap686 has an outer diameter of 0.500 and an inner diameter of 0.380 and is twisted into the shaft 680 to form an interference fit. However, it will be appreciated that other thicknesses of spiral wrap with a different pitch could be used to provide the desired column strength and bend modulus as well as to prevent kinking. A plastic cover is fitted over the articulation joint portion of the shaft to prevent contaminants from entering the shaft through gaps in the articulation joint.
As indicated above, the proximal section of the endoscope shaft is preferably more flexible than the distal section. The proximal portion of the shaft is preferably made of a corrugated polyethylene tubing such as Model No. CLTS 50F-C available from Panduit Inc.
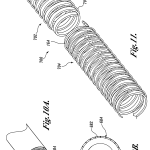
FIG. 11 shows one method of altering the torque fidelity of the distal portion of the shaft. A shaft 700 has a flexible section702 that is toward the distal end of the endoscope break out box and a stiffer section 704 that is more proximal to the break out box (not shown). The portion of the scope that is more distal has an increasing flexibility toward the distal tip and conversely a higher torque fidelity and column strength proximally. To increase the torque fidelity characteristics of the distal section 704 of the shaft, a braid 706 in that section includes two or more wires that are wound in opposite directions. In one embodiment, the wire braid has a pitch of 14-16 picks. However, the number of wires and their spacing can be adjusted as needed in order to tailor the torque fidelity of the shaft.
The more distal end 702 of the shaft 700 has a single spiral of wire 706 that is preferably wound in the same direction as the plastic spiral wrap in the center lumen of the shaft 700. Again, the torque fidelity of the proximal end of the shaft 702 can be varied by adjusting the pitch and/or direction of the wire 706 and its flexibility.
As will be appreciated, the single wire spiral 706 provides some torque fidelity but does have the same torque fidelity as the dual wire braid in the distal section of the shaft in order to allow easy manipulation for, e.g., resolution of loops. The single wire spiral 706 may be omitted from the distal portion of the shaft if even less torque fidelity is desired.
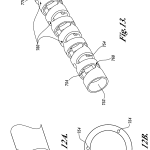
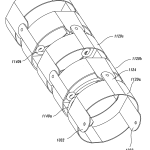
As discussed above, in order to facilitate steering the distal tip of imaging endoscope, the endoscope includes an articulation joint that allows the distal tip to be turned back on itself, i.e., over an arc of 180 degrees, by the control cables and can be directed to make that bend in any direction desired about the circumference of the distal tip. That is, the operator can select both the amount of the bend or articulation and the direction of the bend. As shown in FIGS. 12A and 12B, an articulation joint 750 in accordance with one embodiment of the invention is formed from a cylinder of a plastically deformable material having a central lumen 752, and a number of control cable lumens 754 located in the walls of the articulation joint. If desired, the space between the control cable lumens in the cylinder wall may be thinner such that the control cable lumens form bosses that extend into the central lumen of the cylinder. The control cable lumens 754 are preferably oriented at 120° apart if three control cables are used or 90° apart if four control cables are used.
To facilitate bending of the articulation joint, the cylinder includes a number of live hinges 760 formed along its length. As can be seen in FIG. 13, each live hinge 760 comprises a pair of opposing V-shaped cuts 770 on either side of the cylinder and are separated by a flexible web 772 that forms the bendable portion of the hinge. In the embodiment designed for four control cables, each live hinge is oriented at 90 degrees with respect to an adjacent hinge.
Upon tensioning of a control cable, those live hinges having webs 772 that are in line with the retracting control cable do not bend. Those live hinges having webs that are not in line with the control cable will be closed, thereby bending the articulation joint in the direction of the control cable under tension.
Another advantage of the articulation joint 750 shown in FIG. 13 is that the distal end of the scope can be retracted by pulling all the control cables simultaneously. This allows the physician to maneuver the distal tip in the body without having to move the remaining length of the endoscope. This may be useful when performing surgical procedures such as obtaining a biopsy or snaring polyps.
The articulation joint can be formed by extruding a cylinder with the central and control cable lumens in place and cutting the cylinder tube with a knife, laser, water jet, or other material removal mechanism to form the live hinges. Alternatively, the articulation joint can be molded with the live hinge joints in place. As will be appreciated, the angles of the V-shaped cuts that form the hinges may be uniform or may vary along the length of the articulation joint. Similarly, the distance between adjacent live hinges may be uniform or may vary in order to tailor the bending and torque fidelity characteristics of the articulation joint. In one embodiment of the invention, each live hinge 760 has a closing angle of 30° so that six hinges are required to provide 180° of movement. The distal end of the articulation joint 750 may be counter-bored to receive the distal tip section of the endoscope, as discussed above. Similarly, the proximal end of the articulation joint 750 is adapted to receive the distal end of the shaft section of the endoscope. In the embodiment shown in FIG. 13, the control cable lumens 754 are aligned with the widest spacing of the live hinges and with the web portion of each hinge. However, it may be desirable to offset the control cable lumens 754 with respect to the hinges in order to lessen potential binding of the control cables in the hinge. As indicated above, the articulation joint should be made of a biocompatible material accepted for medical use that will bend but will not collapse. Suitable materials include polyurethane, polyethylene, polypropylene, or other biocompatible polymers.
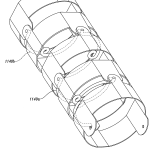
To prevent wear by the control cables as they are pulled by the actuation mechanism in the control cabinet, it may be desirable to produce the articulation joint from a material having areas of different durometers. As shown in FIGS. 14 and 15, a cylinder formed from an extruded tube 780 has alternating bands of a high durometer material 782 and a lower durometer material 784 around its circumference. The lumens 786 used to route the control cables are formed in the high durometer material 782 to resist abrasion as the control cables are tensioned and released. In addition, the high durometer material also reduces friction between the control cables and the surrounding lumen. FIG. 15 illustrates an articulation joint where the control cable lumens are offset with respect to the orientation of the web portions of the live hinges so that the control cables do not pass through the web portion 772 of the hinge.
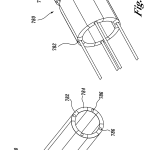
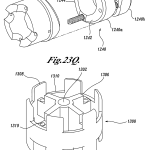
FIGS. 16A and 16B illustrate an alternative embodiment of an articulation joint. In this embodiment, the joint comprises a series of ball and socket connectors that are linked together. As shown in FIG. 16A, each connector includes a socket section 800 and a ball section 802. The ball section 802 fits in a socket section 800 of an adjacent connector. A lumen extends axially through the ball section 802 to allow for passage of the wires that connect to the light source and the image sensor and tubes that carry irrigation fluids and insufflation gases. The ball and socket sections are preferably molded of a biocompatible polymer.
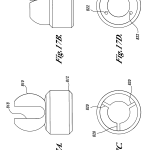
Each socket section can be formed with a fully formed ball section such as ball section 810 shown in FIG. 17A. Alternatively, a partial ball section such as ball section 814 can be formed on a socket section 816 as shown in FIG. 17B. To provide room for the control cables to move, the ball section can include slot 818 as shown in FIGS. 17A, 17B that cuts through the middle and sides of the ball section. Alternatively, a number of smaller slots 820 can be positioned around the circumference of the ball section as shown in FIGS. 17C and 17D. The slots allow the control cables to be shortened under tension. A number of holes 822 at the interface of the ball section and socket section allows passage of the control cables from the socket section into the ball section as shown in FIG. 17D.
In another embodiment of an articulation joint, the articulation joint is made of a series of stacked discs that are positioned adjacent one another and move with respect to each other. As shown in FIG. 18A, a disc 850 comprises an annular ring 852having a pair of rearward facing rocker surfaces or cams 854 and a pair of forward facing rocker surfaces or cams 856. The cams 854 are positioned 180° apart on the rear surface of the annular ring 852, while the forward facing cams 856 are positioned 180 degrees apart on the forward face of the annular ring 852. In the embodiment shown, the forward cams 856 are oriented at 90° with respect to the rear cams 854. Opposite each cam on the other side of the annular ring is a flat land section so that the cams of an adjacent disc may engage with and rock on the flat section. Holes 860 are drilled through the annular ring and through the cams for passage of the control cables. Upon tension of the control cables, the discs will rock on the surface of the cams 854, 856 thereby bending the articulation joint in the desired direction.
FIG. 18B shows an articulation joint made up of a series of stacked discs 850 a, 850 b, 850 c . . . engaged with one another to form an articulation joint. A number of control cables 870 a, 870 b, 870 c, 870 d, pass through the discs and are used to pull the discs on the cam surfaces to move the joint in the desired direction.
FIGS. 19A and 19B show an alternative embodiment of the articulation joint shown in FIGS. 18A and 18B. In this embodiment, an articulation joint comprises a series of stacked discs 880, each comprising an annular ring having a pair of concave pockets 882 on its rear surface and a pair of correspondingly shaped convex cams 884 on its front surface. The concave pockets 882 are oriented at 90° with respect to the convex cams 884 so that adjacent discs may be stacked such that the cams of a disc fit within the pockets of the adjacent disc. The corresponding shaped cams 884 and pockets 882 help prevent the discs from rotating with respect to one another. Holes or lumens 886 are formed through the annular ring 880 for passage of a number of control cables 890 a, 890 b, 890 c, 890 d, as shown in FIG. 19B. The holes or lumens 886 may be positioned at the center of the cams and pockets. However, the holes for the control cables may be offset from the position of the cams and pockets, if desired. Preferably discs 880 are molded from a biocompatible polymer having a relatively slick surface, such as polyurethane, polypropylene, or polyethylene, that reduces friction between adjacent cams and pockets.
FIGS. 20A and 20B show yet another alternative embodiment of an articulation joint. In this embodiment, the articulation joint is formed of a stack of discs, each of which comprises an annular ring. The annular ring has forwardly extending cams having an arcuate slot 892 molded therein that allows a control cable to move more freely in the cam as the disc is moved relative to an adjacent disc. As best shown in FIG. 20B, the slot 892 tapers from a widest point 894 at the outer edge of the cam to a narrow point 896 where the slot forms a cylindrical hole 898 that extends to the opposite edge of the annular ring 880. A control wire 896 is free to bend within the widened portion of the arcuate slot 892 as an adjacent disc is rotated.
Although the discs of the articulation joints shown in FIGS. 18-20 are generally circular in shape, it will be appreciated that other shapes could be used. FIGS. 21A and 21B show an articulation joint formed from a number of sections having a generally square outer shape. As shown in FIG. 21A, a section 900 is a square band having a pair of pins 902 that extend outwardly on opposite sides of the rear surface of the square section. On the opposite sides of the front surface are a pair of opposing circular recesses 904 that are oriented at 90° to the pins on the rear surface and are sized to receive the round pins902 of an adjacent section. In the embodiment shown, the control cables are routed through holes or lumens in corner blocks906 that are found in each corner of the square section 900. FIG. 21B shows two adjacent square sections 900 a, 900 bsecured together. As can be seen, the section 900 b can rotate up or down on its pins with respect to the adjacent section900 a. Although circular and square articulation sections have been shown, it will be appreciated that other segment shapes such as triangular or pentagonal, etc., could also be used to form an articulation joint.
In the embodiments of the articulation joints described above each disc or segment that comprises the joint is preferably made of the same material. However, it is possible to vary the material from which the segments are made and/or the physical dimensions or spacing between adjacent segments in order to vary the flexibility and torque fidelity of the joint along its length.
In some environments, a full 180° turning radius of the distal tip of the imaging endoscope may not be necessary. In those environments, an articulation joint made of interconnected discs or segments may be replaced with a flexible member such as a braided stent. FIG. 22 shows an imaging endoscope 925 having a braided stent 930 as the articulation joint. The braided stent 930 extends between a distal tip 932 and a connector 934 that joins the proximal end of the stent 930 with the distal end of a flexible shaft 936. A cover 938 extends over the flexible shaft 936 and the braided stent 930. Control cables (not shown) extend through a lumen of flexible shaft 936 and are used to pull the stent 930 such that the distal tip 932 is oriented in the desired direction. In addition, pulling all the control cables simultaneously allows the distal tip of the endoscope to be retracted.
FIG. 23 shows one method of securing the distal ends of the control cables to a braided stent 930. The control cables 940 a,940 b, 940 c, 940 d can be woven through the wires of the stent 930 and terminated by forming loops around the wires that comprise the stent. Alternatively, the ends of the cables 940 can be soldered or adhesively secured to the wires of the stent.
FIG. 23A shows yet another alternative embodiment of an articulation joint 1000 for use with a single use endoscope of the present invention. The articulation joint 1000 is made of a series of stacked rings 1002 a, 1002 b, 1002 c, etc. Each ring is preferably formed of a deep-drawn steel or other metal that allows the ring to be stiff while having a thin wall profile in order to maximize the size of the inner lumen. Positioned at equal intervals around the outer circumference of the ring are inwardly extending concave recesses 1004 that receive short spring sections 1006 that are used to join adjacent rings together. Two springs on opposite sides of a ring 1002 are used to join adjacent rings together. For example, if three rings 1002 a, 1002 b, and 1002 c are aligned, the rings 1002 a and 1002 b are joined together with spring segments located at 0° and 180° on the rings, while ring 1002B is joined to ring 1002C with orthogonally aligned spring segments located at 90° and 270° around the rings. A gap is formed between adjacent rings so that the pair of springs forms a flexible joint that can bend in directions that are the away from the longitudinal axis of the articulation joint but has limited ability to compress the articulation joint in the direction of the longitudinal axis of the articulation joint. Each spring 1006 is secured within the concave recess 1004 of the ring 1002 using an adhesive, crimping, welding, or with other securing mechanism.
The articulation joint 1000 shown in FIG. 23A has the advantage that the control cables pass through the center of the spring segments 1006 and on the outer circumference of the articulation joint, thereby maximizing the amount of room available for passage of tubes and other cables through the center opening of each ring 1002 and minimizing the torque required to bend the articulation joint.
FIG. 23B illustrates an alternative embodiment of the articulation joint shown in FIG. 23A. In this embodiment, the articulation joint comprises a number of deep drawn or otherwise formed metal rings 1008 a, 1008 b, 1008 c that are joined together with springs that are located on the inner circumference of each ring. Each ring is connected to an adjacent ring with a pair of spring segments located on opposite sides of the ring. The springs 1010 are secured to the inner circumference of the rings1008 with an adhesive or by welding, or using other securing means. In the embodiment shown in FIG. 23B, the control cables are routed through the spring segments and are more closely positioned to the longitudinal axis of the articulation joint. Being closer to the longitudinal axis may require more force on a control cable to bend the articulation joint in a desired direction.
FIG. 23C shows another alternative embodiment of an articulation joint comprising a series of stacked metal rings 1012 a,1012 b, 1012 c, etc. Each ring 1012 is joined by a spring 1015 having alternate tightly wound sections 1014 and more loosely wound sections 1016, thereby varying the spring force along the length of the spring. The loosely wound sections 1016 allow the articulation joint to collapse in that area while the more closely wound sections 1014 provide the hinge mechanism for adjacent rings 1012. Each of the rings 1012 further includes a stamped pair of inwardly or outwardly extending tabs 1018through which the springs are passed thereby forming a surface to which the springs can be crimped, welded, or otherwise secured. In the embodiment shown in FIG. 23C, each ring is not completely cylindrical but includes sloped front and rear surfaces 1020 that extend away from the point at which adjacent rings are joined. The sloped faces of the rings allow increased movement between adjacent rings and also provide a stop to prevent adjacent rings from sliding past each other. The sloped surfaces 1020 on adjacent rings thereby form a V-shaped groove in which the articulation joint is able to collapse.
FIG. 23D shows another embodiment of an articulation joint that is similar to the articulation joint shown in FIG. 23B. However, in this embodiment, the articulation joint is comprised of a number of rings 1022 a, 1022 b, 1022 c having oppositely arranged concave recesses 1024 and convex recesses that allow a spring 1015 having alternate tightly and loosely wound segments to pass on the outside of one ring and on the inside of an adjacent ring in an alternating fashion. The oppositely arranged convex and concave recesses allow a spring to be secured to the ring with an adhesive, welding, or other bonding mechanism.
FIGS. 23E and 23F illustrate yet another embodiment of an articulation joint in accordance with the present invention. In this embodiment the joint is formed of a series of stacked links 1022 a, 1022 b, 1022 c, etc., that are jointed with alternatingly orthogonally arranged pairs of spring segments 1024. The spring segments 1024 are welded, braised, adhesively secured or otherwise bonded to an inner circumference of each ring segment. The rings and spring segments are preferably made of stainless steel or other biocompatible metal. The springs may be secured to the rings prior to being cut with a laser or other cutting tool. Alternatively, the springs may be cut into segments and then secured to the rings with an assembly jig.
As shown in FIG. 23F, when viewed from the side, each ring has a front surface with a flat section 1026 and a pair of sloped sections 1028 that are sloped rearwardly from the flat surface 1026. The rear surface of the ring has a similar shape but the sloped surfaces are oriented at 90° to the sloped surfaces on the front side. Each sloped surface has an angle of 14° from a line perpendicular to the longitudinal axis of the joint, thereby allowing adjacent rings to bend approximately 28°.
FIG. 23G shows yet another alternative embodiment of an articulation joint in accordance with the present invention. In this embodiment, the articulation joint 1030 comprises a series of metal links 1032 a, 1032 b, 1032 c, etc., that are formed by deep drawing or stamping steel or another metal. Each link has a generally ring-like configuration 1034 that is either circular or may be many-sided such as octagonal. Furthermore, each link 1032 has a pair of rearwardly extending legs 1036 with an outwardly extending tab 1038 at the end thereof. Each of the legs 1036 is positioned on opposite sides of the link 1032. At 90 degrees to the legs 1036, the link 1032 includes corresponding holes 1040 in the sidewalls of the link that receive the tabs1038 from an adjacent segment. Furthermore, the segment 1032 includes integrally formed wire guides 1042 comprising an eyelet for retaining the control cable. Adjacent links in the articulation joint are secured together by inserting the tabs 1038from a first link 1032 into the corresponding holes 1040 of an adjacent link A braid may be placed over the series of links to improve torsional strength without adding to the force required to bend the articulation joint. The braid may be incorporated into a cover that goes over the articulation joint.
FIG. 23H shows an alternative embodiment of a link like those shown in FIG. 23E. However, in this embodiment, the link1050 has a butterfly-shaped hole 1052 instead of the round holes 1040 to receive the tabs of an adjacent link. The butterfly-shaped hole 1052 serves to limit the extent by which a corresponding flat tab can be rotated from an adjacent link. By adjusting the curvature of the arcs that form the butterfly-shaped hole 1052, the degree of rotation between adjacent links can be controlled. The links 1050 are preferably formed by deep drawing metal and/or stamping operations.
FIG. 23I illustrates yet another embodiment of an articulation joint of the present invention that is formed of a series of interconnected metal links 1060. Each link 1060 has a pair of rearwardly extending opposing legs 1062 having inwardly extending tabs at each end. The tabs extend into corresponding holes or slots of an adjacent link. However, in this embodiment, the tabs on each of the legs 1062 extend further into the central lumen of the articulation joint. Each tab also includes a hole 1064 through which a spring 1066 can pass. The holes 1064 thereby lock the tab in the adjacent link because the spring 1066 prevents the tab 1062 from being withdrawn from an adjacent link.
FIG. 23J illustrates yet another embodiment of an articulation joint of the present invention that is of a series of interconnected links 1080 a, 1080 b, 1080 c, etc. Each link has alternating hoops or eyelets 1082 around the circumference thereof that are formed by making a slot that extends circumferentially around a portion of the link, followed by bending a portion of the link inwardly. The slots are arranged such that a pair of inwardly extending eyelets is formed on opposite sides of a front surface of the link with a pair of eyelets oriented at 90° to the eyelets on the front surface formed on the rear surface of the link. With the eyelets thus formed in the links 1080 a, 1080 b, 1080 c, etc., the springs can be secured to the links at each of the eyelets.
FIG. 23K shows another embodiment of an articulation joint of the present invention that is similar in arrangement to the articulation joint shown in FIG. 23J. In this embodiment, the articulation joint comprises a series of metal links 1100 a, 1100b, 1100 c, etc. Each link includes a pair of oppositely formed, inwardly extending tabs 1104 that are bent in a circle through which an elastomeric tube or spring 1106 can be passed. The tubes or springs 1106 are secured in the link by crimping, welding or otherwise securing the tubes, springs 1106 to the tabs 1104.
FIG. 23L shows yet another alternative embodiment of an articulation joint in accordance with the present invention. In this embodiment, the articulation joint comprises a series of stamped or deep drawn metal links 1120 a, 1120 b, 1120 c, etc. Each link includes a pair of forwardly extending tabs 1022 on its front surface and a pair of rearwardly extending tabs 1024 on its rear surface. The tabs 1022 and 1024 on the front and rear surfaces are oriented at 90 degrees with respect to each other. Each of the tabs 1022, 1024 includes a hole through which a securing mechanism can be passed in order to secure aligned tabs together. As shown in FIG. 23M, the securing mechanism is provided by a series of wire springs 1040 a, 1040 b, etc. Each spring comprises a wire with an end that is inserted through the holes of an aligned pair of tabs of the articulation joint. The spring 1040 then travels along the interior lumen of the articulation joint and has a second end that terminates through the holes of another set of aligned tabs that connect another pair of links. Each spring may further include a loop wound therein that acts as an eyelet for retaining a control wire therein.
FIGS. 23N-23P illustrate yet another embodiment of an articulation joint 1200 for use in a disposable endoscope of the present invention. In this embodiment, the articulation joint comprises a series of stacked discs of the type shown in FIG. 23N. Each disc 1202 has a front face 1206 and a rear face 1208. Equally spaced around the periphery of the disc are a number of holes 1210 through which a control cable can pass. The front face 1206 includes a pair of oppositely arranged flat sections 1207 that bisects the disc and defines a pair of surfaces that may engage a corresponding flat surface of an adjacent disc. The front face of the discs further include two sloped sections that are angled proximally away from the flat surface 1207. In one embodiment of the invention, the sloped sections are angled at approximately 14° from a line perpendicular to the longitudinal axis of the disc. Similarly, the rear face 1208 includes two sloped sections that are angled distally away from a pair of flat surfaces that are rotated 90° with respect to the flat surface 1207 on the front face of the disc. As shown in FIG. 23P, the articulation joint 1200 is created by stacking a number of discs 1202 a, 1202 b, 1202 c, etc., such that each disc is aligned with an adjacent disc at the flat surfaces, whereby the sloped sections form a hinge that can close under the tension of a control cable passing through the articulation joint. In the embodiment shown in FIG. 23P, there are seven pairs of stacked segments 1202, wherein each pair is capable of producing a 28° bend. Therefore, the articulation joint1200 shown in FIG. 23P can bend a total of 196° in the up, down, left, or right directions. At the proximal end of the articulation joint 1200 is a proximal connector 1220 that joins the articulation joint to the distal end of the shaft. An outer sheath (not shown) covers the series of stacked discs 1202 to prevent each disc from becoming misaligned.
FIG. 23Q shows another disc that is used to produce an articulation joint of the present invention. Each disc 1240 is similar to the discs 1202 shown in FIGS. 23N and 23M. In this embodiment, each segment has a front face with a pair of sloping surfaces 1242, 1244 that slope away from a pair of opposing flat surfaces 1246. Similarly, on the rear surface of each segment, the sloping surfaces are arranged orthogonally to the sloping surfaces on the front surface. Adjacent discs 1240 a,1240 b are secured together by a pair of oppositely arranged spring segments that have their ends set in a recess or a countersink formed in the flat surface portion of the disc front and rear surfaces. The spring segments also act as guides through which the control cables can pass. Furthermore, the springs prevent adjacent segments from rotating with respect to each other or otherwise becoming misaligned.
FIG. 23R shows another alternative embodiment of a segment that can be used to form an articulation joint in accordance with the present invention. In this embodiment, the articulation joint is comprised of a series of segments 1300 having a central, cylindrical axle 1302 and an outer cylindrical rim 1304. The axle 1302 is joined to the outer cylinder 1304 by a number of outwardly extending spokes 1306. Each spoke is sloped from the center point near the axle downwards towards the midline of the outer ring 1304. The sloped spokes 1306 allow adjacent segments to touch at the axle points and be rotated with respect to each other without the spokes hitting each other. Each spoke further includes a lumen 1312 towards the outer edge, through which a control cable can be passed. The outer rim 1304 of the segment 1300 has alternately spaced teeth 1308, 1310 that are circumferentially arranged such that the teeth of one segment align with the recesses of an adjacent segment.
FIG. 23S shows a series of segments 1300 a, 1300 b, 1300 c, etc., bending with respect to each other to form an articulation joint. Each of the individual segments 1300 is preferably molded of a thermoplastic material or metal.
FIG. 23T shows another alternative embodiment of an articulation joint in accordance with the present invention. In this embodiment, the articulation joint is formed of a series of segments 1330 a, 1330 b, 1330 c, etc. Each segment comprises a central pin 1332 and radially extending legs 1334 at one end thereof. At the outer edge of each leg 1334 is a hole through which a control cable can be passed. The end of the central pin fits against a segment like a spinal column thereby allowing each segment 1332 to rock against an adjacent segment. In some embodiments, it may be desirable to cover the segments with a mesh tube to retain the alignment of the individual segments.
FIG. 23U illustrates another embodiment of a link that is joined to adjacent links to form an articulation joint in accordance with the present invention. In this embodiment, the link comprises a metal injection molded ring having a pair of oppositely arranged, rearwardly extending rings 1352 and a pair of forwardly extending rings 1354 that are oriented at 90° with respect to the rearwardly extending rings 1352. Adjacent rings are therefore aligned by placing the forwardly extending rings of one link against the rearwardly extending rings of an adjacent link. Each ring 1352 or 1354 includes a hole therein through which a rivet can be passed in order to secure the rings together. The inner circumference of the ring 1350 includes a pair of integrated control cable guides 1356 for restraining movement of a control cable in the link.
FIG. 23V illustrates an alternative embodiment of a link 1370 that is similar to the link 1350 shown in FIG. 23T. In this embodiment, each link includes a pair of rearwardly extending tabs 1372 having a hole therein and a pair of forwardly extending tabs 1374 that have an integrally formed pin (not shown) on its inner surface. Once joined, the tabs 1374 having the inwardly extending pins are mated in the holes in the rearwardly extending tabs 1372 of an adjacent link, thereby eliminating the need to secure adjacent links with a separate rivet. The link 1370 also includes a pair of oppositely aligned control cable guides 1376 for restraining movement of a control cable in the link 1370.
FIG. 23W shows another alternative embodiment of a link that is assembled with other links to form an articulation joint in accordance with the present invention. In this embodiment, the link 1390 comprises an injection molded ring having a pair of oppositely opposed arcuate recesses 1392 on its rear surface and correspondingly shaped, forwardly extending arcuate tabs1394 on its front surface. The tabs 1394 on the front surface are orthogonally arranged with respect to the arcuate recesses1392 on a rear surface. Aligned with the inside surface of each of the arcuate tabs 1394 is an integrally formed control cable lumen 1396 that restrains movement of a control cable in the link 1390.
Because the link 1390 is molded of a thermoplastic material, the arcuate tabs 1394 can be press fit into the arcuate recesses 1392 of an adjacent link, thereby permitting the adjacent links to rock back and forth with respect to each other.
In some embodiments, the articulation joint is designed to exert a restoring force so that single use endoscope will tend to straighten upon the release of tension from the control cables. In other cases, it may be desirable to maintain the position of the distal tip in a certain direction. In that case, a construction as shown in FIG. 24 can be used. Here, the shaft of the imaging endoscope includes an inner sleeve 1450 that is overlaid with two or more plastic spiral wraps 1452, 1454, and 1456. Wrap 1452 is wound in the clockwise direction while wrap 1454 is wound in the counter-clockwise direction over the wrap1452 and the wrap 1456 is wound in the same direction as the first wrap 1452. The wraps are formed of a relatively coarse plastic material such that friction is created between the alternatingly wound layers of the wrap. A suitable material for the plastic wrap includes a braided polyester or polyurethane ribbon. Upon tension of the endoscope by any of the control cables, the plastic spiral wraps will move with respect to each other and the friction between the overlapping wraps will tend to maintain the orientation of the endoscope in the desired direction. The endoscope will remain in the desired direction until it is pulled in a different direction by the control cables. Covering the alternatingly wound spiral wraps 1452, 1454, and 1456 is a braid 1458. The braid is formed of one or more plastic or wire threads wound in alternate directions. An outer sleeve 1460covers the braid 1458 to complete the shaft.
FIG. 25 shows another alternative embodiment of a shaft construction for use in a single use endoscope according to the present invention. The shaft includes a cover sheath 1470 having bands of a high durometer material 1472 and a low durometer material 1474 that alternate around the circumference of the sheath 1470. The high durometer material and low durometer materials form longitudinal strips that extend along the length of the shaft. Within the sheath 1470 is a plastic spiral wrap 1475 that prevents the shaft 1470 from crushing as it is bent in a patient’s anatomy. The high durometer materials add to the torque fidelity characteristics of the shaft. The width of the high durometer material strips compared to the low durometer material may be adjusted in accordance with the torque fidelity characteristics desired.
During examination with the imaging endoscope, the physician may need to twist the scope in order to guide it in the desired direction. Because the outer surface of the scope is preferably coated with a lubricant and it is round, it can be difficult for the physician to maintain an adequate purchase on the shaft in order to rotate it. As such, the imaging endoscope of the present invention may include a gripper mechanism that aids the physician in grasping the shaft for either rotating it or moving the shaft longitudinally. One embodiment of a shaft gripping device is shown in FIG. 26. Here, a gripper 1500 comprises a U-shaped member having a pair of legs 1502, 1504 that are aligned with the longitudinal axis of an imaging endoscope 20. At the distal end of the legs 1502, 1504 are two 90° bends 1506, 1508. The gripper 1500 includes a hole 1505 positioned at the curved, bent portion of the gripper that joins the legs as well as holes in each of the 90° sections 1506, 1508. The imaging endoscope passes through the holes such that the gripper 1500 is slideable along the length of the shaft portion of the endoscope. The spring nature of the material used to fashion the gripper causes the legs 1502, 1504 to be biased away from the shaft of the endoscope. Only the friction of the opposing holes at the bent portions 1506, 1508 prevent the gripper 1500from freely sliding along the length of the shaft. On the inner surface of the legs 1502, 1504 are a pair of touch pads 1510,1512, having an inner surface that is shaped to match the outer circumference of the shaft portion of the endoscope. When the physician squeezes the legs 1502, 1504 radially inward, the touch pads 1510, 1512 engage the shaft such that the physician can push or pull the endoscope or rotate it. Upon release of the legs 1502, 1504, the touch pads 1510, 1512release from the surface of the shaft and the gripper 1500 can be moved along the length of the shaft to another location if desired.
FIG. 27 shows a gripper similar to that of FIG. 26 with like parts being identified with the same reference numbers. In this embodiment, the gripper includes two hemispherical discs 1520, 1522, positioned on the outside surface of the legs 1502,1504. The hemispherical surfaces 1520, 1522 are designed to fit within the hand of the physician and increase the radial distance from the gripper to the shaft such that it is easier to twist the shaft, if desired.
FIG. 28 shows yet another alternative embodiment of a shaft gripper. In this example, a gripper 1550 comprises a U-shaped member having a pair of legs 1552, 1554, that are oriented perpendicularly to the longitudinal axis of the imaging endoscope. The legs 1552, 1554 include a recessed section 1556, 1558 that is shaped to receive the outer diameter of the shaft portion of the endoscope. A thumbscrew 1560 is positioned at the distal end of the legs such that the legs can be drawn together and cause the legs 1554, 1556 to securely engage the shaft of the endoscope. Upon release of the thumbscrew 1560, the legs1554, 1552 are biased away from the shaft such that the gripper 1550 can be moved. The shaft can be twisted by rotating the legs 1552, 1554, with respect to the longitudinal axis of the shaft.
FIG. 29 shows an alternative embodiment of the gripper 1550 shown in FIG. 28. In this example, the gripper 1580 includes a U-shaped member having a pair of legs 1582, 1584. At the distal end of each leg is a recess 1586, 1588 that is shaped to receive the outer diameter of the shaft. The shaft is placed in the recesses 1586, 1588, and a thumbscrew is positioned between the ends of the legs 1582, 1584, and the U-shaped bend in the gripper 1580. By tightening the thumbscrew 1590, the legs are compressed against the shaft of the imaging endoscope 20, thereby allowing the physician to rotate the endoscope by moving the gripper 1580.
In one embodiment of the invention the endoscope has a movable sleeve that operates to keep the distal end of the endoscope clean prior to use and covers the end of the scope that was in contact with a patient after the scope has been used.
FIGS. 30A and 30B illustrate one embodiment of an endoscope 1594 having a sponge 1504 at its distal end. The sponge fits over the endoscope and has a peel off wrapper that may be removed and water or other liquid can be applied to the sponge. The water activates a hydrophilic coating so that the distal end of the endoscope has an increased lubricity. In addition, the sponge functions as a gripper when compressed allowing the physician to pull and/or twist the endoscope.
A collapsible sleeve 1598 is positioned over the distal end of the endoscope and can be retracted to expose the lubricated distal tip of the probe. In one embodiment, the sleeve 1598 is secured at its distal end to the sponge 1594 and at its proximal end to the breakout box. Moving the sponge proximally retracts the sleeve so that the endoscope is ready for use. After a procedure, the sponge 1594 is moved distally to extend the sleeve over the distal end of the endoscope. With the sleeve extended, any contaminants on the probe are less likely to contact the patient, the physician or staff performing the procedure.
In some instances, it may be desirable to limit the amount of heat that is dissipated at the distal end of the imaging endoscope. If light emitting diodes are used, they generate heat in the process of producing light for illumination. Similarly, the image sensor generates some heat during operation. In order to limit how hot the distal end of the endoscope may become and/or to provide for increased life for these components, it is necessary to dissipate the heat. One technique for doing so is to fashion a passive heat sink at the distal tip of the imaging endoscope. As shown in FIG. 31, a distal tip 1600includes a cap 1602 and a heat dissipating section 1604 that is made of a heat dissipating material such as a biocompatible metal. The heat dissipating section 1604 includes a semicircular opening 1606 having a relatively flat base 1608 that extends approximately along the diameter of the heat dissipating section 1604. The flat base 1608 forms a pad upon which electrical components such as the LEDs and image sensor can be mounted with a thermally conductive adhesive or other thermally conductive material. The heat generating devices will transfer heat generated during operation to the heat dissipating section1604. The distal cover 1602 covers the distal end of the heat dissipating section 1604 in order to prevent the heat dissipating section 1604 from touching the tissue in the body as well as to protect the body as the imaging catheter is moved in the patient. Prisms, lenses, or other light bending devices may be needed to bend light entering the distal end of the endoscope to any imaging electronics that are secured to the relatively flat base 1608 of the heat dissipating section 1604.
FIG. 32 shows a heat dissipating distal tip of an endoscope wherein the distal tip does not include a cover but is molded from a single piece of heat dissipating material such as a biocompatible metal. The heat dissipating section 1620 again includes a semicircular opening with a relatively flat surface 1622 that extends along the diameter of the section and on which heat generating electronic devices can be mounted. With a semicircular opening formed in the distal end of the heat dissipating distal tip 1620, the illumination mechanism and image sensor are mounted on the flat surface 1622. The irrigation port is oriented to direct water over the hemispherical cutout in order to clean the illumination mechanism and image sensor or image sensor lenses.
In yet another embodiment of the invention, the imaging devices at the distal end of the endoscope can be cooled by air or water passed through a lumen to the end of the endoscope and vented outside the body. For example, air under pressure may be vented through an orifice near the imaging electronics. The expansion of the air lowers its temperature where it cools the imaging electronics. The warmed air is then forced to the proximal end of the endoscope through an exhaust lumen. Alternatively, the endoscope may include a water delivery lumen that delivers water to a heat exchanger at the distal tip. Water warmed by the electronic components in the distal tip is removed in a water return lumen.
FIG. 33 shows an alternative embodiment of the passive heat dissipating distal tip shown in FIG. 31. In this example, the heat dissipating distal tip 1640 has a number of scalloped channels 1642 positioned around the circumference of the distal tip. The scalloped channels 1642 increase the surface area of the heat dissipating distal tip, thereby further increasing the ability of the tip to dissipate heat from the illumination and imaging electronic devices.
Although the present endoscopic imaging system has many uses, it is particularly suited for performing colonoscopic examinations. In one embodiment, a 10-13 mm diameter prototype having a 0.060 inner spiral wrap with a pitch of ¼ inch and coated with a hydrophilic coating was found to have a coefficient of friction of 0.15 compared to 0.85 for conventional endoscopes. In addition, the endoscope of the present invention required 0.5 lbs. of force to push it through a 2-inch U-shaped bend where a conventional endoscope could not pass through such a tight bend. Therefore, the present invention allows colonoscopes to be made inexpensively and lightweight so that they are more comfortable for the patient due to their lower coefficient of friction and better trackability.
In addition to performing colonoscopies, the endoscopic imaging system of the present invention is also useful with a variety of surgical devices including: cannulas, guide wires, sphincterotomes, stone retrieval balloons, retrieval baskets, dilatation balloons, stents, cytology brushes, ligation devices, electrohemostasis devices, sclerotherapy needles, snares and biopsy forceps.
Cannulas are used with the endoscopic imaging system to cannulate the sphincter of Oddi or papilla to gain access to the bile or pancreatic ducts. Guide wires can be delivered down the working channel of the endoscope and used as a rail to deliver a surgical device to an area of interest. Sphincterotomes are used to open the papilla in order to place a stent or remove a stone from a patient. Stone retrieval balloons are used along with a guide wire to pull a stone out of a bile duct. Retrieval baskets are also used to remove stones from a bile duct. Dilatation balloons are used to open up strictures in the gastrointestinal, urinary or pulmonary tracts. Stents are used to open up strictures in the GI, urinary or pulmonary tracts. Stents can be metal or plastic, self-expanding or mechanically expanded, and are normally delivered from the distal end of a catheter. Cytology brushes are used at the end of guide wires to collect cell samples. Ligation devices are used to ligate varices in the esophagus. Band ligators employ elastic bands to cinch varices. Electrohemostasis devices use electrical current to cauterize bleeding tissue in the GI tract. Sclerotherapy needles are used to inject coagulating or sealing solutions into varices. Snares are used to remove polyps from the GI tract, and biopsy forceps are used to collect tissue samples.
Examples of specific surgical procedures that can be treated with the endoscopic imaging system of the present invention include the treatment of gastroesophageal reflux disease (GERD) by the implantation of bulking agents, implants, fundoplication, tissue scarring, suturing, or replacement of valves or other techniques to aid in closure of the lower esophageal sphincter (LES).
Another example of a surgical procedure is the treatment of morbid obesity by deploying implants or performing reduction surgery, gastric bypass and plication or creating tissue folds to help patients lose weight.
Endoscopic mucosal resection (EMR) involves the removal of sessile polyps or flat lesions by filling them with saline or the like to lift them prior to resection. The endoscope of the present invention can be used to deliver needles, snares and biopsy forceps useful in performing this procedure.
In addition, the endoscopic imaging system of the present invention can be used to perform full-thickness resection (FTRD) in which a portion of a GI tract wall is excised and the wounds healed with staplers or fasteners. Finally, the endoscopic imaging system of the present invention can be used to deliver sclerosing agents to kill tissues or drug delivery agents to treat maladies of internal body tissues.
While the preferred embodiment of the invention has been illustrated and described, it will be appreciated that various changes can be made therein without departing from the scope of the invention. For example, although some of the disclosed embodiments use the pull wires to compress the length of the endoscope, it will be appreciated that other mechanisms such as dedicated wires could be used. Alternatively, a spring can be used to bias the endoscope distally and wires used to compress the spring thereby shortening the length of the endoscope. Furthermore, although the disclosed embodiments use rotary servo motors to drive the control cables, other actuators such as linear actuators could be used. Similarly, although the endoscope discussed in connection with the preferred embodiment includes a working channel, it will be appreciated that such a channel may be omitted and the resulting catheter used to deliver a special purpose tool such as a snare, rf ablation tip, etc., to a desired location. Alternatively, the catheter could be used solely for imaging. Finally, although the disclosed components are described as being used in an endoscopic imaging system, it will be appreciated that many components may have separate utility by themselves or in other medical devices. Therefore, the scope of the invention is to be determined from the following claims and equivalents thereof.
CLAIMS(28)
1. A single use endoscope that is removably connectable to a reusable control unit to form a system for examining an internal body cavity of a patient, comprising:
a shaft having a proximal end, a distal end and a number lumens therein;
an articulation joint at or adjacent the distal end;
an imaging assembly at or adjacent the distal end of the shaft to produce images of the internal body cavity, the imaging assembly including:
a hollow cylindrical cap having a cavity therein and a front face through which illumination light passes and an imaging port; and
a heat exchanger assembly received within the cavity of the cap, the heat exchanger including:
a cooling channel having an inlet and an outlet in which a cooling material is passed and a recess;
one or more light emitting diodes mounted on a circuit board that is in thermal contact with the cooling channel; and
a lens assembly that is positioned in the recess of the cooling channel to be aligned between the imaging port and a solid state imaging device secured to the heat exchanger assembly.
2. The single use endoscope of claim 1, wherein the heat exchanger includes two light emitting diodes and the cap of the imaging assembly includes two illumination ports aligned with the two light emitting diodes.
3. The single use endoscope of claim 2, wherein the illumination ports include a window that is coated with a phosphor.
4. The single use endoscope of claim 3, wherein the phosphor is applied to an inside surface of the illumination port windows with an adhesive.
5. The single use endoscope of claim 3, wherein the image assembly includes a cable having at least two shielded leads for transmitting image signals from the solid state imaging device differentially.
6. The single use endoscope of claim 1, wherein the recess of the heat exchanger has a diameter that mates with an outer diameter of the lens assembly in order to retain the lens assembly in the heat exchanger and align it with the imaging device.
7. The single use endoscope of claim 1, wherein the cooling channel includes a lip that extends around a periphery of the cooling channel and against which the circuit board is seated in the cooling channel of the heat exchanger.
8. The single use endoscope of claim 1, wherein the heat exchanger includes a thermistor that produces a signal proportional to the heat of the distal end of the endoscope.
9. An imaging system for use with an endoscope, comprising:
a cap having a hollow internal cavity with a front face through which illumination light passes;
a heat exchanger that is fitted within the internal cavity of the cap, the heat exchanger including:
one or more light emitting diodes mounted on a circuit board;
an image sensor;
a cooling channel having an open face that is sealed by the circuit board such that a cooling material within the cooling channel is in thermal contact with the one or more light emitting diodes; and
a recess into which a lens assembly is fitted and aligned with the image sensor.
10. The image system of claim 9, wherein the front face of the cap has windows therein that are aligned with the one or more light emitting diodes.
11. The imaging system of claim 10, wherein the windows have a phosphor coating on an inside surface thereof.
12. The imaging system of claim 11, wherein the phosphor coating is mixed with an epoxy.
13. The imaging system of claim 12, wherein the epoxy is curable with an ultraviolet light shown through the windows of the cap.
14. The imaging system of claim 9, wherein the cap has a flushing port molded into the front face of the cap that directs a flushing liquid over the cap in front of the lens assembly.
15. The imaging system of claim 9, wherein the recess in which the lens assembly is fitted is generally circular and the cooling channel is generally semicircular in shape and is positioned around the perimeter of the recess.
16. The imaging system of claim 9, wherein the heat exchanger includes a thermistor that produces a signal that is indicative of the heat of a distal end of the endoscope.
17. An endoscope comprising:
a flexible shaft having a proximal end and a distal end and a working channel lumen therein;
a hollow cap having an internal cavity on the distal end of the shaft including a front face with an opening to the working channel of the endoscope;
a heat exchanger that is fitted within the internal cavity of the cap, the heat exchanger including:
a cooling channel through which a cooling liquid passes;
a circuit board having one surface that contacts the cooling liquid in the cooling channel and another surface on which one or more light emitting diodes are mounted, wherein the heat exchanger includes a recess into which a lens assembly is fitted and aligned with an image sensor and wherein the image sensor is secured to the heat exchanger in line with the lens assembly.
18. The endoscope of claim 17, wherein the heat exchanger includes a temperature sensor that produces signals indicative of the temperature at the distal end of the endoscope.
19. An endoscope comprising:
a shaft having a proximal end, a distal end and a working channel;
a cap having an internal cavity and a front face positioned at the distal end of the shaft;
an insert that is fitted within the internal cavity of the cap and behind the front face, that includes:
an illumination source;
a heat exchanger that supports the illumination source, the heat exchanger including a cooling channel in which a liquid is passed and is warmed by heat from the illumination source, wherein the heat exchanger includes a recess into which a lens assembly is fitted and aligned with the image sensor and wherein the illumination source is mounted on a circuit board having a surface that contacts the liquid within the cooling channel.
20. The endoscope of claim 19, wherein the heat exchanger further includes a thermistor that produces a signal indicative of the heat of the distal tip of the endoscope.
21. An endoscope comprising:
a shaft;
a cap at an end of the shaft;
an insert that is fitted within the cap, the insert including:
one or more illumination sources that generate heat when producing illumination light;
a heat exchanger including a cooling channel having an inlet and an outlet through which a fluid is passed to remove heat from the end of the shaft;
an image sensor that is supported by the heat exchanger between the inlet and outlet of the heat exchanger; and
a lens assembly that focuses light onto the image sensor,
wherein the cooling channel of the heat exchanger has a curved shape that forms a recess in the heat exchanger in which the lens assembly is positioned to focus light onto the image sensor.
22. An endoscope comprising:
a shaft having a proximal end, a distal end, and at least one working channel therein;
a hollow cap having a front face at the distal end of the shaft through which illumination light passes; and
a heat exchanger positioned behind the front face of the cap and having an inlet and an outlet and a cooling channel therebetween through which a cooling material is passed, the cooling channel including a circuit board constructed and arranged to have a first surface that contacts the cooling material and a second surface on which one or more LEDs are mounted.
23. The endoscope of claim 22, wherein the hollow cap includes a semicircular cavity and wherein the cooling channel has a semicircular outer surface that fits within the semicircular cavity of the cap.
24. The endoscope of claim 23, wherein the heat exchanger includes an image sensor mounted to the heat exchanger behind the cooling channel and a lens assembly, wherein the cooling channel includes a cylindrical recess in which a lens assembly is positioned and aligned with the image sensor.
25. The endoscope of claim 23, wherein the heat exchanger includes a pair of proximally extending legs having lumens therein that are fluidly coupled to the inlet and outlet of the cooling channel.
26. The endoscope of claim 25, wherein the image sensor is mounted to the heat exchanger between the pair of proximally extending legs and in line with the cylindrical recess.
27. The endoscope of claim 22, wherein the hollow cap includes an opening to the working channel of the shaft.
28. An imaging assembly for an endoscope, comprising:
a hollow cap having a front face, an opening to a working channel within the front face, and a semicircular cavity behind the front face; and
a heat exchanger having a semicircular shape that fits in the semicircular cavity of the cap, the heat exchanger including a semicircular cooling channel that extends around a cylindrical recess having a diameter that mates with a lens assembly fitted within the cylindrical recess.
| Cited Patent | Filing date | Publication date | Applicant | Title |
|---|---|---|---|---|
| US3266059 | Jun 19, 1963 | Aug 16, 1966 | North American Aviation Inc | Prestressed flexible joint for mechanical arms and the like |
| US3470876 | Sep 28, 1966 | Oct 7, 1969 | John Barchilon | Dirigible catheter |
| US3572325 | Oct 25, 1968 | Mar 23, 1971 | Us Health Education & Welfare | Flexible endoscope having fluid conduits and control |
| US3581738 | Nov 12, 1968 | Jun 1, 1971 | Welch Allyn Inc | Disposable illuminating endoscope and method of manufacture |
| US4108211 | Apr 21, 1976 | Aug 22, 1978 | Fuji Photo Optical Co., Ltd. | Articulated, four-way bendable tube structure |
| US4286585 | Dec 7, 1979 | Sep 1, 1981 | Olympus Optical Co., Ltd. | Bend angle control for endoscope |
| US4294162 | Jul 23, 1979 | Oct 13, 1981 | United Technologies Corporation | Force feel actuator fault detection with directional threshold |
| US4311134 | May 16, 1979 | Jan 19, 1982 | Olympus Optical Co., Ltd. | Fluid feeding device for an endoscope |
| US4315309 | Jun 25, 1979 | Feb 9, 1982 | Coli Robert D | Integrated medical test data storage and retrieval system |
| US4351323 | Oct 10, 1980 | Sep 28, 1982 | Kabushiki Kaisha Medos Kenkyusho | Curvable pipe assembly in endoscope |
| US4425113 | Jun 21, 1982 | Jan 10, 1984 | Baxter Travenol Laboratories, Inc. | Flow control mechanism for a plasmaspheresis assembly or the like |
| US4432349 | Oct 5, 1981 | Feb 21, 1984 | Fuji Photo Optical Co., Ltd. | Articulated tube structure for use in an endoscope |
| US4471766 | May 22, 1979 | Sep 18, 1984 | Inbae Yoon | Ring applicator with an endoscope |
| US4473841 | Sep 27, 1982 | Sep 25, 1984 | Fuji Photo Film Co., Ltd. | Video signal transmission system for endoscope using solid state image sensor |
| US4488039 | Sep 3, 1982 | Dec 11, 1984 | Fuji Photo Film Co., Ltd. | Imaging system having vari-focal lens for use in endoscope |
| US4491865 | Sep 29, 1982 | Jan 1, 1985 | Welch Allyn, Inc. | Image sensor assembly |
| US4493537 | Nov 4, 1982 | Jan 15, 1985 | Olympus Optical Co., Ltd. | Objective lens system for endoscopes |
| US4495134 | Nov 16, 1982 | Jan 22, 1985 | Kabushiki Kaisha Medos Kenkyusho | Method for manufacturing a flexible tube for an endoscope |
| US4499895 | Oct 14, 1982 | Feb 19, 1985 | Olympus Optical Co., Ltd. | Endoscope system with an electric bending mechanism |
| US4503842 | Nov 2, 1982 | Mar 12, 1985 | Olympus Optical Co., Ltd. | Endoscope apparatus with electric deflection mechanism |
| US4513235 | Jan 24, 1983 | Apr 23, 1985 | British Aerospace Public Limited Company | Control apparatus |
| US4515444 | Jun 30, 1983 | May 7, 1985 | Dyonics, Inc. | Optical system |
| US4516063 | Jan 24, 1983 | May 7, 1985 | British Aerospace Public Limited Company | Control apparatus |
| US4519391 | Sep 28, 1982 | May 28, 1985 | Fuji Photo Film Co., Ltd. | Endoscope with signal transmission system and method of operating same |
| US4552130 | Feb 24, 1984 | Nov 12, 1985 | Olympus Optical Co., Ltd. | Air and liquid supplying device for endoscopes |
| US4559928 | Feb 15, 1985 | Dec 24, 1985 | Olympus Optical Co., Ltd. | Endoscope apparatus with motor-driven bending mechanism |
| US4566437 | May 2, 1984 | Jan 28, 1986 | Olympus Optical Co., Ltd. | Endoscope |
| US4573450 | Nov 2, 1984 | Mar 4, 1986 | Fuji Photo Optical Co., Ltd. | Endoscope |
| US4580210 | Apr 17, 1984 | Apr 1, 1986 | Saab-Scania Aktiebolag | Control system having variably biased manipulatable unit |
| US4586923 | Jun 25, 1984 | May 6, 1986 | Cordis Corporation | Curving tip catheter |
| US4615330 | Aug 29, 1984 | Oct 7, 1986 | Olympus Optical Co., Ltd. | Noise suppressor for electronic endoscope |
| US4616630 | Aug 16, 1985 | Oct 14, 1986 | Fuji Photo Optical Co., Ltd. | Endoscope with an obtusely angled connecting section |
| US4617915 | Apr 23, 1985 | Oct 21, 1986 | Fuji Photo Optical Co., Ltd. | Construction of manual control section of endoscope |
| US4618884 | Sep 4, 1984 | Oct 21, 1986 | Olympus Optical Co., Ltd. | Image pickup and observation equipment for endoscope |
| US4621618 | Feb 27, 1985 | Nov 11, 1986 | Olympus Optical Company, Ltd. | Dual viewing and control apparatus for endoscope |
| US4622584 | Sep 5, 1984 | Nov 11, 1986 | Olympus Optical Co., Ltd. | Automatic dimmer for endoscope |
| US4625714 | Aug 16, 1985 | Dec 2, 1986 | Fuji Photo Optical Co., Ltd. | Endoscope having a control for image stand still and photographing the image |
| US4631582 | Aug 16, 1985 | Dec 23, 1986 | Olympus Optical Co., Ltd. | Endoscope using solid state image pick-up device |
| US4633303 | Aug 30, 1985 | Dec 30, 1986 | Olympus Optical Co., Ltd. | Two-dimensional bandwidth compensating circuit for an endoscope using a solid state image pick-up device |
| US4633604 | Dec 2, 1985 | Jan 6, 1987 | Russell Corporation | Automatic garment portion loader |
| US4643170 | Nov 27, 1985 | Feb 17, 1987 | Olympus Optical Co., Ltd. | Endoscope apparatus |
| US4646723 | Aug 19, 1985 | Mar 3, 1987 | Fuji Photo Optical Co., Ltd. | Construction of a forward end portion of an endoscope using a heat conductive material |
| US4649904 | Jan 2, 1986 | Mar 17, 1987 | Welch Allyn, Inc. | Biopsy seal |
| US4651202 | Apr 23, 1985 | Mar 17, 1987 | Fuji Photo Optical Co., Ltd. | Video endoscope system |
| US4652093 | Nov 16, 1983 | Mar 24, 1987 | Gwyndann Group Limited | Optical instruments |
| US4652916 | Oct 12, 1984 | Mar 24, 1987 | Omron Tateisi Electronics Co. | Image pick-up device |
| US4654701 | Aug 30, 1985 | Mar 31, 1987 | Olympus Optical Co., Ltd. | Biopsy information recording apparatus for endoscope |
| US4662725 | Feb 12, 1985 | May 5, 1987 | Olympous Optical Co., Ltd. | Objective lens system for endoscopes |
| US4663657 | Aug 29, 1984 | May 5, 1987 | Olympus Optical Company, Ltd. | Image pickup apparatus for endoscopes |
| US4667655 | Jan 16, 1986 | May 26, 1987 | Olympus Optical Co., Ltd. | Endoscope apparatus |
| US4674844 | Jul 24, 1985 | Jun 23, 1987 | Olympus Optical Co., Ltd. | Objective lens system for an endscope |
| US4686963 | Mar 5, 1986 | Aug 18, 1987 | Circon Corporation | Torsion resistant vertebrated probe of simple construction |
| US4697210 | Aug 16, 1985 | Sep 29, 1987 | Fuji Photo Optical Co., Ltd. | Endoscope for displaying a normal image |
| US4700693 | Dec 9, 1985 | Oct 20, 1987 | Welch Allyn, Inc. | Endoscope steering section |
| US4714075 | Feb 10, 1986 | Dec 22, 1987 | Welch Allyn, Inc. | Biopsy channel for endoscope |
| US4716457 | Feb 24, 1987 | Dec 29, 1987 | Kabushiki Kaisha Toshiba | Electronic endoscopic system |
| US4719508 | Oct 1, 1986 | Jan 12, 1988 | Olympus Optical Co., Ltd. | Endoscopic photographing apparatus |
| US4727417 | May 11, 1987 | Feb 23, 1988 | Olympus Optical Co., Ltd. | Endoscope video apparatus |
| US4727418 | Jun 20, 1986 | Feb 23, 1988 | Olympus Optical Co., Ltd. | Image processing apparatus |
| US4745470 | Apr 3, 1987 | May 17, 1988 | Olympus Optical Co., Ltd. | Endoscope using a chip carrier type solid state imaging device |
| US4745471 | May 12, 1987 | May 17, 1988 | Olympus Optical Co., Ltd. | Solid-state imaging apparatus and endoscope |
| US4746974 | Feb 5, 1987 | May 24, 1988 | Kabushiki Kaisha Toshiba | Endoscopic apparatus |
| US4748970 | May 14, 1987 | Jun 7, 1988 | Olympus Optical Co., Ltd. | Endoscope systems |
| US4755029 | May 19, 1987 | Jul 5, 1988 | Olympus Optical Co., Ltd. | Objective for an endoscope |
| US4762119 | Jul 28, 1987 | Aug 9, 1988 | Welch Allyn, Inc. | Self-adjusting steering mechanism for borescope or endoscope |
| US4765312 | Jul 29, 1987 | Aug 23, 1988 | Olympus Optical Co., Ltd. | Endoscope |
| US4766489 | Jul 30, 1987 | Aug 23, 1988 | Olympus Optical Co., Ltd. | Electronic endoscope with image edge enhancement |
| US4787369 | Aug 14, 1987 | Nov 29, 1988 | Welch Allyn, Inc. | Force relieving, force limiting self-adjusting steering for borescope or endoscope |
| US4790294 | Jul 28, 1987 | Dec 13, 1988 | Welch Allyn, Inc. | Ball-and-socket bead endoscope steering section |
| US4794913 | Dec 2, 1987 | Jan 3, 1989 | Olympus Optical Co., Ltd. | Suction control unit for an endoscope |
| US4796607 | Jul 28, 1987 | Jan 10, 1989 | Welch Allyn, Inc. | Endoscope steering section |
| US4800869 | Feb 8, 1988 | Jan 31, 1989 | Olympus Optical Co. Ltd. | Endoscope |
| US4805596 | Mar 28, 1988 | Feb 21, 1989 | Olympus Optical Co., Ltd. | Endoscope |
| US4806011 | Jul 6, 1987 | Feb 21, 1989 | Bettinger David S | Spectacle-mounted ocular display apparatus |
| US4816909 | Dec 16, 1987 | Mar 28, 1989 | Olympus Optical Co., Ltd. | Video endoscope system for use with different sizes of solid state devices |
| US4819065 | Apr 23, 1987 | Apr 4, 1989 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| US4819077 | Apr 15, 1987 | Apr 4, 1989 | Kabushiki Kaisha Toshiba | Color image processing system |
| US4821116 | Mar 18, 1987 | Apr 11, 1989 | Olympus Optical Co., Ltd. | Endoscope equipment |
| US4824225 | Jun 1, 1988 | Apr 25, 1989 | Olympus Optical Co., Ltd. | Illumination optical system for an endoscope |
| US4831437 | Apr 19, 1988 | May 16, 1989 | Olympus Optical Co., Ltd. | Video endoscope system provided with color balance adjusting means |
| US4836187 | Dec 28, 1987 | Jun 6, 1989 | Kabushiki Kaisha Machidaseisakujyo | Constant pressure apparatus of an endoscope |
| US4844052 | Mar 11, 1988 | Jul 4, 1989 | Kabushiki Kaisha Machidaseisakujyo Bunkyo-Ku | Apparatus for transmitting liquid and gas in an endoscope |
| US4844071 | Mar 31, 1988 | Jul 4, 1989 | Baxter Travenol Laboratories, Inc. | Endoscope coupler device |
| US4845553 | May 19, 1988 | Jul 4, 1989 | Olympus Optical Co., Ltd. | Image data compressing device for endoscope |
| US4845555 | Feb 8, 1988 | Jul 4, 1989 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| US4847694 | Dec 1, 1987 | Jul 11, 1989 | Kabushiki Kaisha Toshiba | Picture archiving and communication system in which image data produced at various locations is stored in data bases at various locations in accordance with lists of image ID data in the data bases |
| US4853772 | Feb 22, 1988 | Aug 1, 1989 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus having isolated patient and secondary circuitry |
| US4860731 | Oct 11, 1988 | Aug 29, 1989 | Olympus Optical Co., Ltd. | Endoscope |
| US4867546 | Mar 14, 1988 | Sep 19, 1989 | Olympus Optical Co., Ltd. | Objective lens system for an endoscope |
| US4868647 | Aug 22, 1988 | Sep 19, 1989 | Olympus Optical Co., Ltd. | Electronic endoscopic apparatus isolated by differential type drive means |
| US4869237 | Mar 1, 1988 | Sep 26, 1989 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus |
| US4873965 | Jul 15, 1988 | Oct 17, 1989 | Guido Danieli | Flexible endoscope |
| US4875468 | Dec 23, 1988 | Oct 24, 1989 | Welch Allyn, Inc. | Elastomer-ePTFE biopsy channel |
| US4877314 | May 24, 1988 | Oct 31, 1989 | Olympus Optical Co., Ltd. | Objective lens system for endoscopes |
| US4882623 | Aug 11, 1988 | Nov 21, 1989 | Olympus Optical Co., Ltd. | Signal processing apparatus for endoscope capable of changing outline enhancement frequency |
| US4884134 | Aug 30, 1988 | Nov 28, 1989 | Olympus Optical Co., Ltd. | Video endoscope apparatus employing device shutter |
| US4885634 | Aug 1, 1988 | Dec 5, 1989 | Olympus Optical Co., Ltd. | Endoscope apparatus capable of monochrome display with respect to specific wavelength regions in the visible region |
| US4890159 | Dec 13, 1988 | Dec 26, 1989 | Olympus Optical Co., Ltd. | Endoscope system and method of unifying picture images in an endoscope system |
| US6449006 * | Sep 21, 1995 | Sep 10, 2002 | Apollo Camera, Llc | LED illumination system for endoscopic cameras |
| US6480389 * | Mar 19, 2002 | Nov 12, 2002 | Opto Tech Corporation | Heat dissipation structure for solid-state light emitting device package |
| US6551240 * | Dec 7, 2001 | Apr 22, 2003 | Marc U. Henzler | Endoscope |
| US6692251 * | Aug 4, 2000 | Feb 17, 2004 | Kerr Corporation | Apparatus and method for curing materials with light radiation |
| US6734893 * | Dec 4, 1998 | May 11, 2004 | Olympus Winter & Ibe Gmbh | Endoscopy illumination system for stroboscopy |
| US6796939 * | Aug 25, 2000 | Sep 28, 2004 | Olympus Corporation | Electronic endoscope |
| US6856436 * | Jun 23, 2003 | Feb 15, 2005 | Innovations In Optics, Inc. | Scanning light source system |
| US6871993 * | Jul 1, 2002 | Mar 29, 2005 | Accu-Sort Systems, Inc. | Integrating LED illumination system for machine vision systems |
| US7024573 * | Feb 5, 2002 | Apr 4, 2006 | Hewlett-Packard Development Company, L.P. | Method and apparatus for cooling heat generating components |
| US7169167 * | Dec 4, 2001 | Jan 30, 2007 | Scimed Life Systems, Inc. | Endoscopic apparatus and method |
| US20020193664 * | Dec 28, 2000 | Dec 19, 2002 | Ross Ian Michael | Light source for borescopes and endoscopes |
| US20030032860 * | Jul 19, 2002 | Feb 13, 2003 | Arie Avni | Video rectoscope |
| US20040170017 * | Feb 27, 2003 | Sep 2, 2004 | James Zhan | Long distance illuminator |
| US20040190305 * | Dec 3, 2003 | Sep 30, 2004 | Gelcore Llc | LED light with active cooling |
| US20050030754 * | Oct 23, 2003 | Feb 10, 2005 | Licht Harold Jay | Systems, devices, and methods for mounting a light emitting diode |
| US20050137459 * | Dec 17, 2003 | Jun 23, 2005 | Scimed Life Systems, Inc. | Medical device with OLED illumination light source |
| US20050180136 * | Nov 28, 2003 | Aug 18, 2005 | Popovich John M. | Electronic assembly/system with reduced cost, mass, and volume and increased efficiency and power density |
| USRE32421 | Aug 9, 1984 | May 19, 1987 | Olympus Optical Co., Ltd. | Data transmission system for an endoscope apparatus |
| Citing Patent | Filing date | Publication date | Applicant | Title |
|---|---|---|---|---|
| US7611457 * | Jan 13, 2006 | Nov 3, 2009 | Hoya Corporation | Front end structure of endoscope |
| US7713192 * | Oct 4, 2006 | May 11, 2010 | Olympus Corporation | Endoscope system |
| US7749160 * | Dec 26, 2006 | Jul 6, 2010 | Olympus Corporation | Endoscope device |
| US7824329 * | Aug 18, 2005 | Nov 2, 2010 | Stryker Gi Ltd. | Control system for supplying fluid medium to endoscope |
| US8012085 * | Jul 3, 2006 | Sep 6, 2011 | Srj Corporation | Method for collecting/transporting a medical capsule and endoscopic apparatus for the method |
| US8269828 * | Feb 27, 2008 | Sep 18, 2012 | Perceptron, Inc. | Thermal dissipation for imager head assembly of remote inspection device |
| US8337455 | Sep 7, 2010 | Dec 25, 2012 | Boston Scientific Scimed, Inc. | Steerable device and system |
| US8372003 * | Apr 16, 2008 | Feb 12, 2013 | Gyrus Acmi, Inc. | Light source power based on predetermined sensed condition |
| US8394116 * | Apr 15, 2009 | Mar 12, 2013 | The Regents Of The University Of Michigan | Surgical tools and components thereof |
| US8480572 * | Feb 12, 2010 | Jul 9, 2013 | Olympus Corporation | Adapter-type endoscope and method of closely contacting electrical connection portion main body of adapter-type endoscope and electrode, and adapter main body and distal end portion main body |
| US8512232 | Sep 8, 2009 | Aug 20, 2013 | Gyrus Acmi, Inc. | Endoscopic illumination system, assembly and methods for staged illumination of different target areas |
| US8523899 * | Aug 22, 2012 | Sep 3, 2013 | Olympus Medical Systems Corp. | Treatment device for endoscope |
| US20080158349 * | Feb 27, 2008 | Jul 3, 2008 | Perceptron, Inc. | Thermal Dissipation For Imager Head Assembly Of Remote Inspection Device |
| US20080208006 * | Apr 28, 2008 | Aug 28, 2008 | Mina Farr | Opto-electronic illumination and vision module for endoscopy |
| US20090318758 * | Mar 27, 2009 | Dec 24, 2009 | Vivid Medical, Inc. | Pluggable vision module and portable display for endoscopy |
| US20100033563 * | Sep 22, 2009 | Feb 11, 2010 | Perceptron, Inc. | Light Pipe For Imaging Head of Video Inspection Device |
| US20100042104 * | Apr 15, 2009 | Feb 18, 2010 | Sridhar Kota | Surgical tools and components thereof |
| US20100168520 * | Dec 10, 2009 | Jul 1, 2010 | Minimally Invasive Devices, Llc | View optimizer and stabilizer for use with surgical scopes |
| US20100198009 * | Apr 13, 2010 | Aug 5, 2010 | Vivid Medical, Inc. | Disposable endoscope and portable display |
| US20100217084 * | Feb 12, 2010 | Aug 26, 2010 | Takakazu Ishigami | Adapter-type endoscope and method of closely contacting electrical connection portion main body of adapter-type endoscope and electrode, and adapter main body and distal end portion main body |
| US20100245549 * | Apr 29, 2010 | Sep 30, 2010 | The Trustees Of Columbia University In The City Of New York | Insertable surgical imaging device |
| US20110028790 * | Sep 17, 2010 | Feb 3, 2011 | Vivid Medical, Inc. | Disposable endoscopic access device and portable display |
| US20110090331 * | Oct 15, 2009 | Apr 21, 2011 | Perceptron, Inc. | Articulating imager for video borescope |
| US20110257478 * | Apr 20, 2011 | Oct 20, 2011 | Spinewindow Llc | Method and apparatus for performing retro peritoneal dissection |
| US20120041260 * | Aug 10, 2010 | Feb 16, 2012 | Ronald Yamada | Endoscope gripping device |
| US20120046522 * | Aug 19, 2011 | Feb 23, 2012 | Olympus Medical Systems Corp. | Endoscopic system |
| DE102011055526A1 | Nov 18, 2011 | May 23, 2013 | Invendo Medical Gmbh | Medizinisches Endoskop mit Kühlvorrichtung für eingebaute elektrische Bauteile |
| EP2594188A1 | Nov 14, 2012 | May 22, 2013 | Invendo Medical Gmbh | Medical endoscope comprising cooling means |
| WO2006039016A1 | Aug 26, 2005 | Apr 13, 2006 | Boston Scient Scimed Inc | Manually controlled endoscope |
| WO2012096778A1 * | Dec 22, 2011 | Jul 19, 2012 | Poincare Systemes, Inc. | Motor components and devices incorporating such motor components |
| U.S. Classification | 600/129, 600/169, 600/109, 600/153 |
| International Classification | A61B1/31, A61B1/06, A61B1/00, A61B1/04, A61B1/05, A61B1/015, A61B1/005 |
| Cooperative Classification | A61B2017/00314, A61B1/0055, A61B2017/00309, A61B2017/00327, A61B2017/0042, A61B1/0057
A61B1/05, A61B1/00071, A61B1/00147,A61B1/0051, A61B1/015, A61B1/0008, A61B1/31, A61B1/0052, A61B1/0676, A61B1/0684, A61B1/0638 |
| European Classification | A61B1/06, A61B1/005B, A61B1/00E4, A61B1/00E4H, A61B1/00P, A61B1/06R4, A61B1/06R6,
A61B1/005B4 |
| Date | Code | Event | Description |
|---|---|---|---|
| Sep 23, 2011 | FPAY | Fee payment |
Year of fee payment: 4
|
| Jul 21, 2009 | CC | Certificate of correction | |
| Jan 6, 2005 | AS | Assignment |
Owner name: FOSTER-MILLER, INC., MASSACHUSETTS
Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNOR:CLARK, RICHARD JOSEPH;REEL/FRAME:015539/0054
Effective date: 20041208
|
| Dec 17, 2004 | AS | Assignment |
Owner name: OPTIKOS CORPORATION, MASSACHUSETTS
Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:FANTONE, STEPHEN D.;ORBAND, DANIEL G.;SABER, MICHAEL P.;AND OTHERS;REEL/FRAME:015467/0135;SIGNING DATES FROM 20041201 TO 20041203
Owner name: SCIMED LIFE SYSTEMS, INC., MINNESOTA
Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNOR:OPTIKOS CORPORATION;REEL/FRAME:015467/0159
Effective date: 20041201
|
| Dec 15, 2004 | AS | Assignment |
Owner name: SCIMED LIFE SYSTEMS, INC., MINNESOTA
Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNOR:FOSTER-MILLER, INC.;REEL/FRAME:015462/0896
Effective date: 20041101
|
| Dec 14, 2004 | AS | Assignment |
Owner name: FOSTER-MILLER, INC., MASSACHUSETTS
Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:COPPOLA, PATSY ANTHONY;KIROUAC, ANDREW PETER;WIESMAN, RICHARD M.;AND OTHERS;REEL/FRAME:015450/0726;SIGNING DATES FROM 20041101 TO 20041102
Owner name: SCIMED LIFE SYSTEMS, INC., MINNESOTA
Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:BANIK, MICHAEL S.;BOULAIS, DENNIS R.;COUVILLON, JR., LUCIEN ALFRED;AND OTHERS;REEL/FRAME:015450/0696;SIGNING DATES FROM 20040810 TO 20041203
|

